|
g2o
|
#include <fstream>#include "g2o/core/sparse_optimizer.h"#include "g2o/solvers/pcg/linear_solver_pcg.h"#include "g2o/core/block_solver.h"#include "g2o/core/linear_solver.h"#include "g2o/core/optimization_algorithm_factory.h"#include "g2o/types/slam3d/types_slam3d.h"#include "g2o/types/slam3d_addons/types_slam3d_addons.h"#include "g2o/stuff/macros.h"#include "g2o/stuff/command_args.h"#include <iostream>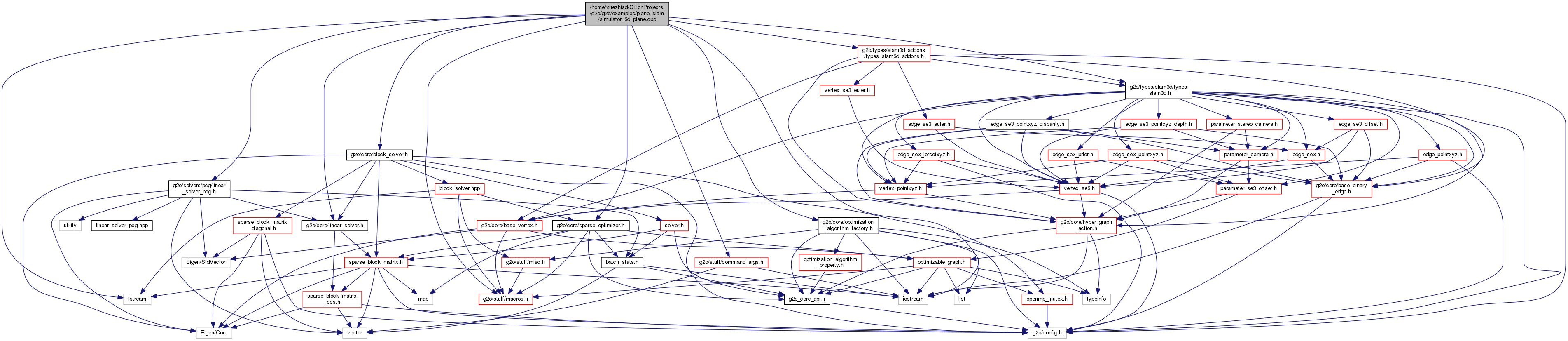
Go to the source code of this file.
Classes | |
| struct | SimulatorItem |
| struct | WorldItem |
| struct | Sensor |
| struct | Robot |
| struct | Simulator |
| struct | PlaneItem |
| struct | PlaneSensor |
Typedefs | |
| typedef std::set< WorldItem * > | WorldItemSet |
| typedef std::vector< Sensor * > | SensorVector |
| typedef std::vector< Robot * > | RobotVector |
Functions | |
| double | uniform_rand (double lowerBndr, double upperBndr) |
| double | gauss_rand (double sigma) |
| Eigen::Isometry3d | sample_noise_from_se3 (const Vector6d &cov) |
| Vector3d | sample_noise_from_plane (const Vector3d &cov) |
| int | main (int argc, char **argv) |
| typedef std::vector<Robot*> RobotVector |
Definition at line 158 of file simulator_3d_plane.cpp.
| typedef std::vector<Sensor*> SensorVector |
Definition at line 92 of file simulator_3d_plane.cpp.
| typedef std::set<WorldItem*> WorldItemSet |
Definition at line 78 of file simulator_3d_plane.cpp.
| double gauss_rand | ( | double | sigma | ) |
Definition at line 27 of file simulator_3d_plane.cpp.
References uniform_rand().
Referenced by sample_noise_from_plane(), sample_noise_from_se3(), g2o::tutorial::Simulator::sampleTransformation(), and g2o::tutorial::Simulator::simulate().
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 252 of file simulator_3d_plane.cpp.
References Simulator::_lastVertexId, PlaneSensor::_nplane, PlaneSensor::_offsetVertex, Simulator::_robots, g2o::BaseRobot::_sensors, Simulator::_world, g2o::OptimizableGraph::addParameter(), g2o::SparseBlockMatrix< MatrixType >::block(), g2o::SparseOptimizer::computeMarginals(), g2o::OptimizationAlgorithmFactory::construct(), g2o::BaseVertex< D, T >::estimate(), g2o::Plane3D::fromVector(), g2o::OptimizableGraph::Vertex::hessianIndex(), g2o::SparseOptimizer::initializeOptimization(), g2o::OptimizationAlgorithmFactory::instance(), g2o::OptimizationAlgorithmFactory::listSolvers(), M_PI, Simulator::move(), g2o::SparseOptimizer::optimize(), g2o::CommandArgs::param(), g2o::CommandArgs::parseArgs(), Simulator::relativeMove(), sample_noise_from_se3(), g2o::OptimizableGraph::save(), Simulator::sense(), g2o::SparseOptimizer::setAlgorithm(), g2o::BaseVertex< D, T >::setEstimate(), g2o::OptimizableGraph::Vertex::setFixed(), g2o::Parameter::setId(), g2o::SparseOptimizer::setVerbose(), g2o::SparseOptimizer::solver(), g2o::SparseOptimizer, WorldItem::vertex(), g2o::OptimizableGraph::vertex(), and g2o::VertexSE3::write().
| Vector3d sample_noise_from_plane | ( | const Vector3d & | cov | ) |
Definition at line 57 of file simulator_3d_plane.cpp.
References gauss_rand().
Referenced by PlaneSensor::sense().
| Eigen::Isometry3d sample_noise_from_se3 | ( | const Vector6d & | cov | ) |
Definition at line 38 of file simulator_3d_plane.cpp.
References gauss_rand().
Referenced by main(), and Robot::move().
| double uniform_rand | ( | double | lowerBndr, |
| double | upperBndr | ||
| ) |
Definition at line 22 of file simulator_3d_plane.cpp.
Referenced by gauss_rand(), g2o::tutorial::Rand::gauss_rand(), and g2o::tutorial::Simulator::simulate().
 1.8.11
1.8.11

