|
g2o
|
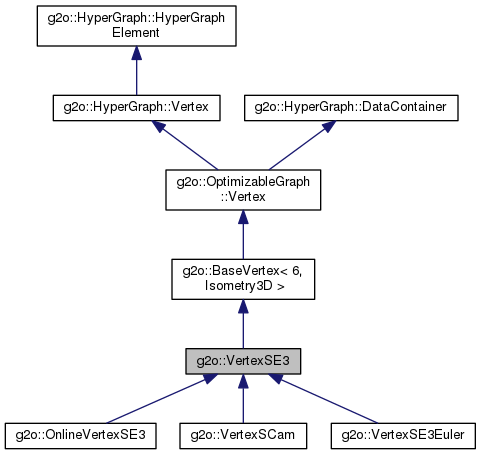
3D pose Vertex, represented as an Isometry3D More...
#include <vertex_se3.h>

Public Member Functions | |
| VertexSE3 () | |
| virtual void | setToOriginImpl () |
| sets the node to the origin (used in the multilevel stuff) More... | |
| virtual bool | read (std::istream &is) |
| read the vertex from a stream, i.e., the internal state of the vertex More... | |
| virtual bool | write (std::ostream &os) const |
| write the vertex to a stream More... | |
| virtual bool | setEstimateDataImpl (const double *est) |
| virtual bool | getEstimateData (double *est) const |
| virtual int | estimateDimension () const |
| virtual bool | setMinimalEstimateDataImpl (const double *est) |
| virtual bool | getMinimalEstimateData (double *est) const |
| virtual int | minimalEstimateDimension () const |
| virtual void | oplusImpl (const double *update) |
| SE3Quat | G2O_ATTRIBUTE_DEPRECATED (estimateAsSE3Quat() const) |
| wrapper function to use the old SE3 type More... | |
| void | G2O_ATTRIBUTE_DEPRECATED (setEstimateFromSE3Quat(const SE3Quat &se3)) |
| wrapper function to use the old SE3 type More... | |
 Public Member Functions inherited from g2o::BaseVertex< 6, Isometry3D > Public Member Functions inherited from g2o::BaseVertex< 6, Isometry3D > | |
| BaseVertex () | |
| virtual const double & | hessian (int i, int j) const |
| get the element from the hessian matrix More... | |
| virtual double & | hessian (int i, int j) |
| virtual double | hessianDeterminant () const |
| virtual double * | hessianData () |
| virtual void | mapHessianMemory (double *d) |
| virtual int | copyB (double *b_) const |
| virtual const double & | b (int i) const |
| get the b vector element More... | |
| virtual double & | b (int i) |
| Eigen::Matrix< double, D, 1, Eigen::ColMajor > & | b () |
| return right hand side b of the constructed linear system More... | |
| const Eigen::Matrix< double, D, 1, Eigen::ColMajor > & | b () const |
| virtual double * | bData () |
| return a pointer to the b vector associated with this vertex More... | |
| virtual void | clearQuadraticForm () |
| virtual double | solveDirect (double lambda=0) |
| HessianBlockType & | A () |
| return the hessian block associated with the vertex More... | |
| const HessianBlockType & | A () const |
| virtual void | push () |
| backup the position of the vertex to a stack More... | |
| virtual void | pop () |
| restore the position of the vertex by retrieving the position from the stack More... | |
| virtual void | discardTop () |
| pop the last element from the stack, without restoring the current estimate More... | |
| virtual int | stackSize () const |
| return the stack size More... | |
| const EstimateType & | estimate () const |
| return the current estimate of the vertex More... | |
| void | setEstimate (const EstimateType &et) |
| set the estimate for the vertex also calls updateCache() More... | |
| Public Member Functions inherited from g2o::OptimizableGraph::Vertex | |
| Vertex () | |
| virtual Vertex * | clone () const |
| returns a deep copy of the current vertex More... | |
| virtual | ~Vertex () |
| void | setToOrigin () |
| sets the node to the origin (used in the multilevel stuff) More... | |
| bool | setEstimateData (const double *estimate) |
| bool | setEstimateData (const std::vector< double > &estimate) |
| virtual bool | getEstimateData (std::vector< double > &estimate) const |
| bool | setMinimalEstimateData (const double *estimate) |
| bool | setMinimalEstimateData (const std::vector< double > &estimate) |
| virtual bool | getMinimalEstimateData (std::vector< double > &estimate) const |
| void | oplus (const double *v) |
| int | hessianIndex () const |
| temporary index of this node in the parameter vector obtained from linearization More... | |
| int | G2O_ATTRIBUTE_DEPRECATED (tempIndex() const) |
| void | setHessianIndex (int ti) |
| set the temporary index of the vertex in the parameter blocks More... | |
| void | G2O_ATTRIBUTE_DEPRECATED (setTempIndex(int ti)) |
| bool | fixed () const |
| true => this node is fixed during the optimization More... | |
| void | setFixed (bool fixed) |
| true => this node should be considered fixed during the optimization More... | |
| bool | marginalized () const |
| true => this node is marginalized out during the optimization More... | |
| void | setMarginalized (bool marginalized) |
| true => this node should be marginalized out during the optimization More... | |
| int | dimension () const |
| dimension of the estimated state belonging to this node More... | |
| virtual void | setId (int id) |
| sets the id of the node in the graph be sure that the graph keeps consistent after changing the id More... | |
| void | setColInHessian (int c) |
| set the row of this vertex in the Hessian More... | |
| int | colInHessian () const |
| get the row of this vertex in the Hessian More... | |
| const OptimizableGraph * | graph () const |
| OptimizableGraph * | graph () |
| void | lockQuadraticForm () |
| void | unlockQuadraticForm () |
| virtual void | updateCache () |
| CacheContainer * | cacheContainer () |
| Public Member Functions inherited from g2o::HyperGraph::Vertex | |
| Vertex (int id=InvalidId) | |
| creates a vertex having an ID specified by the argument More... | |
| int | id () const |
| returns the id More... | |
| const EdgeSet & | edges () const |
| returns the set of hyper-edges that are leaving/entering in this vertex More... | |
| EdgeSet & | edges () |
| returns the set of hyper-edges that are leaving/entering in this vertex More... | |
| virtual HyperGraphElementType | elementType () const |
| Public Member Functions inherited from g2o::HyperGraph::HyperGraphElement | |
| virtual | ~HyperGraphElement () |
| HyperGraphElement * | clone () const |
| Public Member Functions inherited from g2o::HyperGraph::DataContainer | |
| DataContainer () | |
| virtual | ~DataContainer () |
| const Data * | userData () const |
| the user data associated with this vertex More... | |
| Data * | userData () |
| void | setUserData (Data *obs) |
| void | addUserData (Data *obs) |
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | |
Static Public Attributes | |
| static const int | orthogonalizeAfter = 1000 |
| Static Public Attributes inherited from g2o::BaseVertex< 6, Isometry3D > | |
| static const int | Dimension |
| dimension of the estimate (minimal) in the manifold space More... | |
Protected Attributes | |
| int | _numOplusCalls |
| store how often opluse was called to trigger orthogonaliation of the rotation matrix More... | |
| Protected Attributes inherited from g2o::BaseVertex< 6, Isometry3D > | |
| HessianBlockType | _hessian |
| Eigen::Matrix< double, D, 1, Eigen::ColMajor > | _b |
| EstimateType | _estimate |
| BackupStackType | _backup |
| Protected Attributes inherited from g2o::OptimizableGraph::Vertex | |
| OptimizableGraph * | _graph |
| Data * | _userData |
| int | _hessianIndex |
| bool | _fixed |
| bool | _marginalized |
| int | _dimension |
| int | _colInHessian |
| OpenMPMutex | _quadraticFormMutex |
| CacheContainer * | _cacheContainer |
| Protected Attributes inherited from g2o::HyperGraph::Vertex | |
| int | _id |
| EdgeSet | _edges |
| Protected Attributes inherited from g2o::HyperGraph::DataContainer | |
| Data * | _userData |
Additional Inherited Members | |
| Public Types inherited from g2o::BaseVertex< 6, Isometry3D > | |
| typedef Isometry3D | EstimateType |
| typedef std::stack< EstimateType, std::vector< EstimateType, Eigen::aligned_allocator< EstimateType > > > | BackupStackType |
| typedef Eigen::Map< Eigen::Matrix< double, D, D, Eigen::ColMajor >, Eigen::Matrix< double, D, D, Eigen::ColMajor >::Flags &Eigen::AlignedBit?Eigen::Aligned:Eigen::Unaligned > | HessianBlockType |
3D pose Vertex, represented as an Isometry3D
3D pose vertex, represented as an Isometry3D, i.e., an affine transformation which is constructed by only concatenating rotation and translation matrices. Hence, no scaling or projection. To avoid that the rotational part of the Isometry3D gets numerically unstable we compute the nearest orthogonal matrix after a large number of calls to the oplus method.
The parameterization for the increments constructed is a 6d vector (x,y,z,qx,qy,qz) (note that we leave out the w part of the quaternion.
Definition at line 50 of file vertex_se3.h.
| g2o::VertexSE3::VertexSE3 | ( | ) |
Definition at line 41 of file vertex_se3.cpp.
References setToOriginImpl(), and g2o::OptimizableGraph::Vertex::updateCache().
|
inlinevirtual |
returns the dimension of the extended representation used by get/setEstimate(double*) -1 if it is not supported
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 78 of file vertex_se3.h.
|
inline |
wrapper function to use the old SE3 type
Definition at line 117 of file vertex_se3.h.
References g2o::internal::toSE3Quat().
|
inline |
wrapper function to use the old SE3 type
Definition at line 119 of file vertex_se3.h.
References g2o::internal::fromSE3Quat().
|
inlinevirtual |
writes the estimater to an array of double
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 72 of file vertex_se3.h.
References g2o::internal::toVectorQT().
|
inlinevirtual |
writes the estimate to an array of double
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 88 of file vertex_se3.h.
References g2o::internal::toVectorMQT().
|
inlinevirtual |
returns the dimension of the extended representation used by get/setEstimate(double*) -1 if it is not supported
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 94 of file vertex_se3.h.
|
inlinevirtual |
update the position of this vertex. The update is in the form (x,y,z,qx,qy,qz) whereas (x,y,z) represents the translational update and (qx,qy,qz) corresponds to the respective elements. The missing element qw of the quaternion is recovred by || (qw,qx,qy,qz) || == 1 => qw = sqrt(1 - || (qx,qy,qz) ||
Implements g2o::OptimizableGraph::Vertex.
Reimplemented in g2o::VertexSCam, and g2o::OnlineVertexSE3.
Definition at line 105 of file vertex_se3.h.
References g2o::internal::approximateNearestOrthogonalMatrix(), and g2o::internal::fromVectorMQT().
Referenced by g2o::OnlineVertexSE3::oplusImpl(), and g2o::VertexSCam::oplusImpl().
|
virtual |
read the vertex from a stream, i.e., the internal state of the vertex
Implements g2o::OptimizableGraph::Vertex.
Reimplemented in g2o::VertexSCam, and g2o::VertexSE3Euler.
Definition at line 49 of file vertex_se3.cpp.
References g2o::internal::fromVectorQT(), and g2o::BaseVertex< 6, Isometry3D >::setEstimate().
|
inlinevirtual |
writes the estimater to an array of double
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 66 of file vertex_se3.h.
References g2o::internal::fromVectorQT().
|
inlinevirtual |
sets the initial estimate from an array of double
Reimplemented from g2o::OptimizableGraph::Vertex.
Definition at line 82 of file vertex_se3.h.
References g2o::internal::fromVectorMQT().
|
inlinevirtual |
sets the node to the origin (used in the multilevel stuff)
Implements g2o::OptimizableGraph::Vertex.
Definition at line 59 of file vertex_se3.h.
Referenced by VertexSE3().
|
virtual |
write the vertex to a stream
Implements g2o::OptimizableGraph::Vertex.
Reimplemented in g2o::VertexSCam, and g2o::VertexSE3Euler.
Definition at line 58 of file vertex_se3.cpp.
References g2o::BaseVertex< 6, Isometry3D >::_estimate, and g2o::internal::toVectorQT().
Referenced by main().
|
protected |
store how often opluse was called to trigger orthogonaliation of the rotation matrix
Definition at line 122 of file vertex_se3.h.
| g2o::VertexSE3::EIGEN_MAKE_ALIGNED_OPERATOR_NEW |
Definition at line 53 of file vertex_se3.h.
|
static |
Definition at line 55 of file vertex_se3.h.
 1.8.11
1.8.11

