|
g2o
|
#include <g2o/core/base_vertex.h>#include <g2o/core/base_binary_edge.h>#include <g2o/core/base_unary_edge.h>#include <Eigen/Core>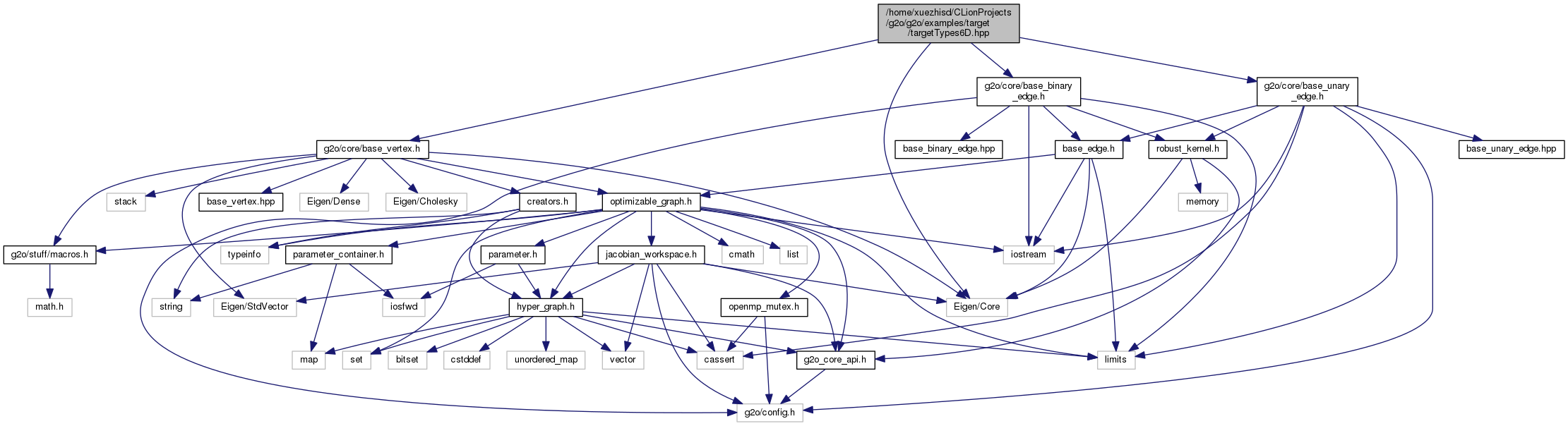
Go to the source code of this file.
Classes | |
| class | VertexPosition3D |
| class | PositionVelocity3DEdge |
| class | VertexPositionVelocity3D |
| class | TargetOdometry3DEdge |
| class | GPSObservationEdgePositionVelocity3D |
Typedefs | |
| typedef Eigen::Matrix< double, 6, 1 > | Vector6d |
| typedef Eigen::Matrix< double, 6, 6 > | Matrix6d |
| typedef Eigen::Matrix<double,6,6> Matrix6d |
Definition at line 12 of file targetTypes6D.hpp.
| typedef Eigen::Matrix<double,6,1> Vector6d |
Definition at line 11 of file targetTypes6D.hpp.
 1.8.11
1.8.11

