|
g2o
|
Public Member Functions | |
| Sensor (Robot *robot_) | |
| Robot * | robot () |
| virtual bool | isVisible (const WorldItem *) const |
| virtual bool | sense (WorldItem *, const Isometry3d &) |
| virtual | ~Sensor () |
Protected Attributes | |
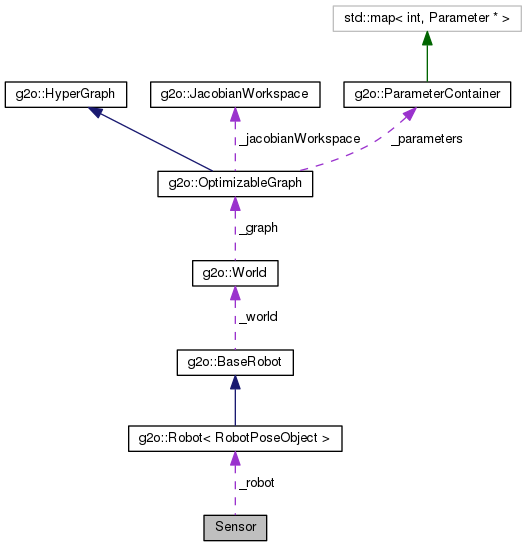
| Robot * | _robot |
Definition at line 82 of file simulator_3d_plane.cpp.
|
inline |
Definition at line 83 of file simulator_3d_plane.cpp.
|
inlinevirtual |
Definition at line 87 of file simulator_3d_plane.cpp.
|
inlinevirtual |
Reimplemented in PlaneSensor.
Definition at line 85 of file simulator_3d_plane.cpp.
|
inline |
Definition at line 84 of file simulator_3d_plane.cpp.
|
inlinevirtual |
Reimplemented in PlaneSensor.
Definition at line 86 of file simulator_3d_plane.cpp.
Referenced by Robot::sense().
|
protected |
Definition at line 87 of file simulator_3d_plane.cpp.
 1.8.11
1.8.11

