|
g2o
|
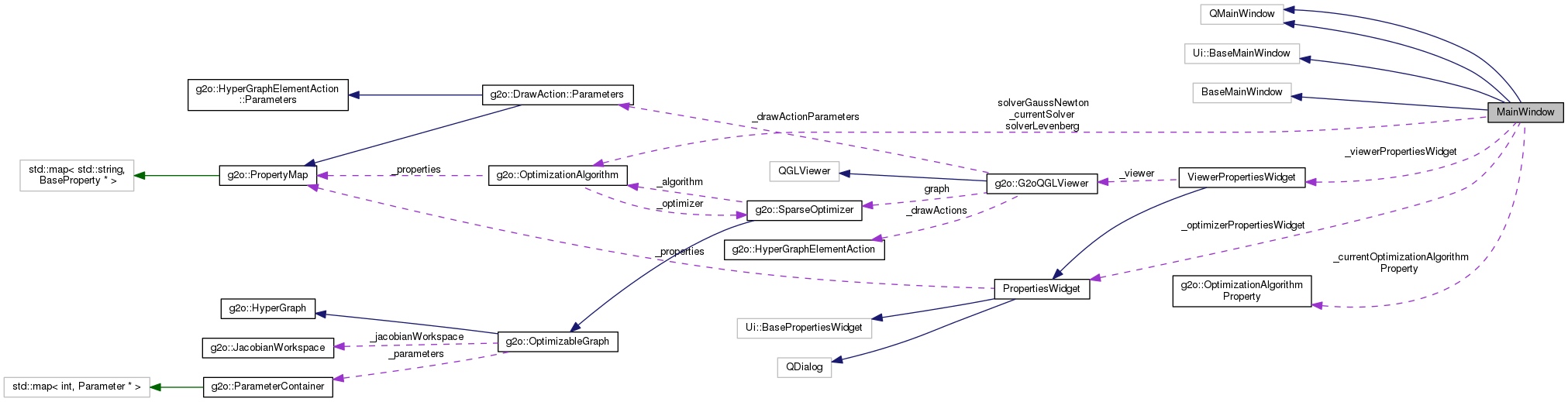
main window of the g2o viewer More...
#include <main_window.h>
Public Slots | |
| void | on_actionLoad_triggered (bool) |
| void | on_actionSave_triggered (bool) |
| void | on_actionQuit_triggered (bool) |
| void | on_actionWhite_Background_triggered (bool) |
| void | on_actionDefault_Background_triggered (bool) |
| void | on_actionProperties_triggered (bool) |
| void | on_actionSave_Screenshot_triggered (bool) |
| void | on_actionLoad_Viewer_State_triggered (bool) |
| void | on_actionSave_Viewer_State_triggered (bool) |
| void | on_btnOptimize_clicked () |
| void | on_btnInitialGuess_clicked () |
| void | on_btnSetZero_clicked () |
| void | on_btnForceStop_clicked () |
| void | on_btnOptimizerParamaters_clicked () |
| void | on_actionLoad_triggered (bool) |
| void | on_actionSave_triggered (bool) |
| void | on_actionQuit_triggered (bool) |
| void | on_btnOptimize_clicked () |
| void | on_btnInitialGuess_clicked () |
Public Member Functions | |
| MainWindow (QWidget *parent=0, Qt::WindowFlags flags=0) | |
| ~MainWindow () | |
| void | updateDisplayedSolvers () |
| void | updateRobustKernels () |
| bool | loadFromFile (const QString &filename) |
| MainWindow (QWidget *parent=0, Qt::WindowFlags flags=0) | |
| ~MainWindow () | |
Public Attributes | |
| g2o::OptimizationAlgorithm * | solverGaussNewton |
| g2o::OptimizationAlgorithm * | solverLevenberg |
Protected Member Functions | |
| void | fixGraph () |
| bool | allocateSolver (bool &allocatedNewSolver) |
| bool | prepare () |
| void | setRobustKernel () |
| bool | load (const QString &filename) |
| void | fixGraph () |
main window of the g2o viewer
Definition at line 40 of file main_window.h.
| MainWindow::MainWindow | ( | QWidget * | parent = 0, |
| Qt::WindowFlags | flags = 0 |
||
| ) |
Definition at line 41 of file main_window.cpp.
| MainWindow::~MainWindow | ( | ) |
Definition at line 52 of file main_window.cpp.
| MainWindow::MainWindow | ( | QWidget * | parent = 0, |
| Qt::WindowFlags | flags = 0 |
||
| ) |
| MainWindow::~MainWindow | ( | ) |
|
protected |
Definition at line 255 of file main_window.cpp.
References _currentOptimizationAlgorithmProperty, _currentSolver, _lastSolver, and g2o::OptimizationAlgorithmFactory::construct().
Referenced by on_btnOptimize_clicked(), and on_btnOptimizerParamaters_clicked().
|
protected |
|
protected |
Definition at line 150 of file main_window.cpp.
References g2o::OptimizableGraph::Vertex::graph(), g2o::HyperGraph::Vertex::id(), and g2o::OptimizableGraph::Vertex::setFixed().
Referenced by loadFromFile().
|
protected |
Definition at line 229 of file main_window.cpp.
References _knownSolvers, _lastSolver, g2o::OptimizationAlgorithmProperty::desc, g2o::OptimizableGraph::dimensions(), g2o::OptimizableGraph::isSolverSuitable(), and g2o::OptimizationAlgorithmProperty::name.
Referenced by loadFromFile().
| bool MainWindow::loadFromFile | ( | const QString & | filename | ) |
load a graph on which we will operate from a file
Definition at line 352 of file main_window.cpp.
References fixGraph(), and load().
Referenced by on_actionLoad_triggered(), and g2o::RunG2OViewer::run().
|
slot |
Definition at line 369 of file main_window.cpp.
|
slot |
|
slot |
Definition at line 56 of file main_window.cpp.
References loadFromFile().
|
slot |
Definition at line 430 of file main_window.cpp.
|
slot |
Definition at line 375 of file main_window.cpp.
References _viewerPropertiesWidget, and ViewerPropertiesWidget::setViewer().
|
slot |
|
slot |
Definition at line 175 of file main_window.cpp.
|
slot |
Definition at line 407 of file main_window.cpp.
|
slot |
|
slot |
Definition at line 64 of file main_window.cpp.
|
slot |
Definition at line 442 of file main_window.cpp.
|
slot |
Definition at line 363 of file main_window.cpp.
|
slot |
|
slot |
|
slot |
Definition at line 114 of file main_window.cpp.
References __PRETTY_FUNCTION__.
|
slot |
|
slot |
Definition at line 77 of file main_window.cpp.
References _forceStopFlag, allocateSolver(), prepare(), and setRobustKernel().
|
slot |
Definition at line 385 of file main_window.cpp.
References _currentSolver, _optimizerPropertiesWidget, allocateSolver(), prepare(), g2o::OptimizationAlgorithm::properties(), and PropertiesWidget::setProperties().
|
slot |
Definition at line 140 of file main_window.cpp.
|
protected |
Definition at line 289 of file main_window.cpp.
References _currentOptimizationAlgorithmProperty, g2o::OptimizableGraph::Vertex::dimension(), g2o::OptimizationAlgorithmProperty::landmarkDim, g2o::OptimizationAlgorithmProperty::requiresMarginalize, g2o::OptimizableGraph::Vertex::setMarginalized(), and g2o::HyperGraph::vertices().
Referenced by on_btnOptimize_clicked(), and on_btnOptimizerParamaters_clicked().
|
protected |
Definition at line 311 of file main_window.cpp.
References g2o::AbstractRobustKernelCreator::construct(), g2o::HyperGraph::edges(), g2o::HyperGraph::Vertex::id(), g2o::OptimizableGraph::Edge::robustKernel(), g2o::RobustKernel::setDelta(), g2o::OptimizableGraph::Edge::setRobustKernel(), g2o::HyperGraph::Edge::vertex(), and g2o::HyperGraph::Edge::vertices().
Referenced by on_btnOptimize_clicked().
| void MainWindow::updateDisplayedSolvers | ( | ) |
list the available solvers in the GUI
Definition at line 180 of file main_window.cpp.
References _knownSolvers, g2o::OptimizationAlgorithmProperty::name, and g2o::OptimizationAlgorithmProperty::type.
Referenced by g2o::RunG2OViewer::run().
| void MainWindow::updateRobustKernels | ( | ) |
list the available robust kernels in the GUI
Definition at line 453 of file main_window.cpp.
Referenced by g2o::RunG2OViewer::run().
|
protected |
Definition at line 90 of file main_window.h.
Referenced by allocateSolver(), and prepare().
|
protected |
Definition at line 91 of file main_window.h.
Referenced by allocateSolver(), and on_btnOptimizerParamaters_clicked().
|
protected |
Definition at line 89 of file main_window.h.
Referenced by on_btnForceStop_clicked(), and on_btnOptimize_clicked().
|
protected |
Definition at line 87 of file main_window.h.
Referenced by load(), and updateDisplayedSolvers().
|
protected |
Definition at line 88 of file main_window.h.
Referenced by allocateSolver(), and load().
|
protected |
Definition at line 94 of file main_window.h.
Referenced by on_btnOptimizerParamaters_clicked().
|
protected |
Definition at line 93 of file main_window.h.
Referenced by on_actionProperties_triggered().
| g2o::OptimizationAlgorithm* MainWindow::solverGaussNewton |
Definition at line 35 of file main_window.h.
Referenced by main().
| g2o::OptimizationAlgorithm* MainWindow::solverLevenberg |
Definition at line 36 of file main_window.h.
Referenced by main().
 1.8.11
1.8.11

