|
g2o
|
#include <hyper_graph.h>
Public Member Functions | |
| Edge (int id=InvalidId) | |
| creates and empty edge with no vertices More... | |
| virtual | ~Edge () |
| virtual void | resize (size_t size) |
| const VertexContainer & | vertices () const |
| VertexContainer & | vertices () |
| const Vertex * | vertex (size_t i) const |
| Vertex * | vertex (size_t i) |
| void | setVertex (size_t i, Vertex *v) |
| int | id () const |
| void | setId (int id) |
| virtual HyperGraphElementType | elementType () const |
| int | numUndefinedVertices () const |
 Public Member Functions inherited from g2o::HyperGraph::HyperGraphElement Public Member Functions inherited from g2o::HyperGraph::HyperGraphElement | |
| virtual | ~HyperGraphElement () |
| HyperGraphElement * | clone () const |
Protected Attributes | |
| VertexContainer | _vertices |
| int | _id |
| unique id More... | |
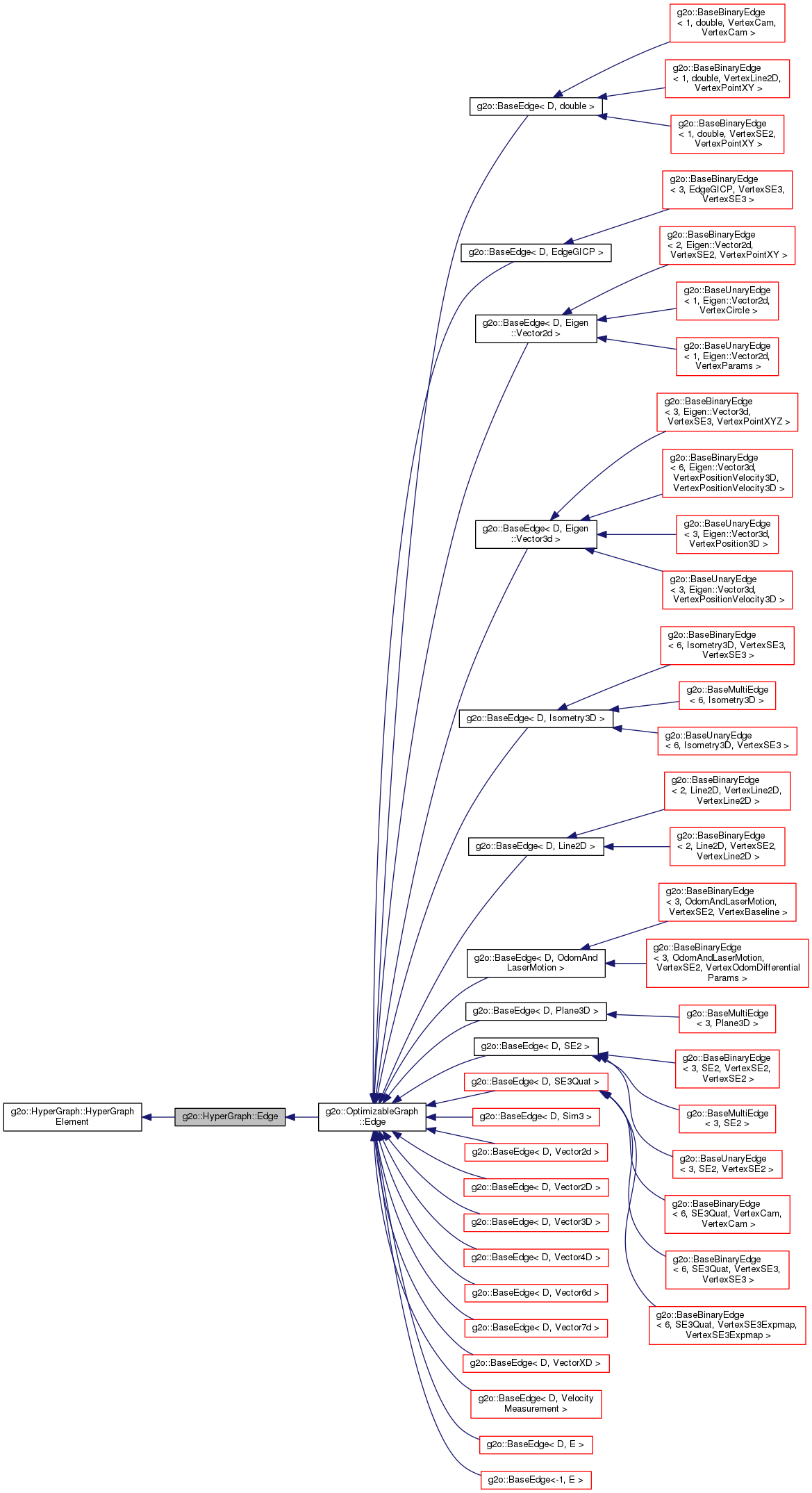
Abstract Edge class. Your nice edge classes should inherit from that one. An hyper-edge has pointers to the vertices it connects and stores them in a vector.
Definition at line 165 of file hyper_graph.h.
|
explicit |
creates and empty edge with no vertices
Definition at line 51 of file hyper_graph.cpp.
|
virtual |
Reimplemented in g2o::OptimizableGraph::Edge.
Definition at line 55 of file hyper_graph.cpp.
|
inlinevirtual |
returns the type of the graph element, see HyperGraphElementType
Implements g2o::HyperGraph::HyperGraphElement.
Definition at line 198 of file hyper_graph.h.
References HGET_EDGE.
|
inline |
Definition at line 196 of file hyper_graph.h.
Referenced by g2o::OptimizableGraph::saveEdge(), g2o::OptimizableGraph::setFixed(), and setId().
| int g2o::HyperGraph::Edge::numUndefinedVertices | ( | ) | const |
Definition at line 59 of file hyper_graph.cpp.
References _vertices.
Referenced by g2o::OptimizableGraph::addEdge(), g2o::SparseOptimizer::initializeOptimization(), g2o::EdgeSE2PointXYWriteGnuplotAction::operator()(), and g2o::OptimizableGraph::setEdgeVertex().
|
virtual |
resizes the number of vertices connected by this edge
Reimplemented in g2o::BaseMultiEdge<-1, E >, g2o::BaseMultiEdge< D, E >, g2o::BaseMultiEdge< 6, Isometry3D >, g2o::BaseMultiEdge< 3, SE2 >, g2o::BaseMultiEdge< 4, Vector4D >, g2o::BaseMultiEdge< 2, Vector2D >, g2o::BaseMultiEdge< 3, Plane3D >, g2o::BaseMultiEdge<-1, VectorXD >, g2o::BaseMultiEdge< 3, VelocityMeasurement >, g2o::BaseBinaryEdge< D, E, VertexXi, VertexXj >, g2o::BaseBinaryEdge< 1, double, VertexLine2D, VertexPointXY >, g2o::BaseBinaryEdge< 2, Vector2D, VertexSBAPointXYZ, VertexSim3Expmap >, g2o::BaseBinaryEdge< 6, Eigen::Vector3d, VertexPositionVelocity3D, VertexPositionVelocity3D >, g2o::BaseBinaryEdge< 3, Vector3D, VertexSBAPointXYZ, VertexCam >, g2o::BaseBinaryEdge< 1, double, VertexCam, VertexCam >, g2o::BaseBinaryEdge< 2, Vector2d, VertexCameraBAL, VertexPointBAL >, g2o::BaseBinaryEdge< 2, Vector2D, VertexPointXY, VertexPointXY >, g2o::BaseBinaryEdge< 4, Vector4D, VertexSE2, VertexSegment2D >, g2o::BaseBinaryEdge< 2, Vector2D, VertexSE2, VertexSegment2D >, g2o::BaseBinaryEdge< 7, Sim3, VertexSim3Expmap, VertexSim3Expmap >, g2o::BaseBinaryEdge< 2, Line2D, VertexLine2D, VertexLine2D >, g2o::BaseBinaryEdge< 2, Vector2D, VertexSE2, VertexPointXY >, g2o::BaseBinaryEdge< 3, EdgeGICP, VertexSE3, VertexSE3 >, g2o::BaseBinaryEdge< 2, Vector2D, VertexSBAPointXYZ, VertexSE3Expmap >, g2o::BaseBinaryEdge< 6, Isometry3D, VertexSE3, VertexSE3 >, g2o::BaseBinaryEdge< 3, Eigen::Vector3d, VertexSE3, VertexPointXYZ >, g2o::BaseBinaryEdge< 4, Vector4D, VertexPlane, VertexPlane >, g2o::BaseBinaryEdge< 2, Line2D, VertexSE2, VertexLine2D >, g2o::BaseBinaryEdge< 6, SE3Quat, VertexSE3, VertexSE3 >, g2o::BaseBinaryEdge< 1, double, VertexSE2, VertexPointXY >, g2o::BaseBinaryEdge< 7, Vector7d, VertexSE3, VertexLine3D >, g2o::BaseBinaryEdge< 3, Vector3D, VertexSE2, VertexSegment2D >, g2o::BaseBinaryEdge< 3, Vector3D, VertexSBAPointXYZ, VertexSE3Expmap >, g2o::BaseBinaryEdge< 6, SE3Quat, VertexCam, VertexCam >, g2o::BaseBinaryEdge< 3, SE2, VertexSE2, VertexSE2 >, g2o::BaseBinaryEdge< 6, SE3Quat, VertexSE3Expmap, VertexSE3Expmap >, g2o::BaseBinaryEdge< 3, Vector3D, VertexPointXYZ, VertexPointXYZ >, g2o::BaseBinaryEdge< 3, Vector3D, VertexSE3, VertexPointXYZ >, g2o::BaseBinaryEdge< 2, Vector2D, VertexSBAPointXYZ, VertexCam >, g2o::BaseBinaryEdge< 3, OdomAndLaserMotion, VertexSE2, VertexBaseline >, g2o::BaseBinaryEdge< 3, OdomAndLaserMotion, VertexSE2, VertexOdomDifferentialParams >, g2o::BaseBinaryEdge< 3, Vector3D, VertexSBAPointXYZ, VertexSCam >, g2o::BaseBinaryEdge< 2, Eigen::Vector2d, VertexSE2, VertexPointXY >, g2o::BaseBinaryEdge< 6, Vector6d, VertexLine3D, VertexLine3D >, g2o::BaseUnaryEdge< D, E, VertexXi >, g2o::BaseUnaryEdge< 6, Isometry3D, VertexSE3 >, g2o::BaseUnaryEdge< 3, Eigen::Vector3d, VertexPosition3D >, g2o::BaseUnaryEdge< 1, Eigen::Vector2d, VertexCircle >, g2o::BaseUnaryEdge< 3, SE2, VertexSE2 >, g2o::BaseUnaryEdge< 2, Vector2D, VertexSE2 >, g2o::BaseUnaryEdge< 3, Eigen::Vector3d, VertexPositionVelocity3D >, g2o::BaseUnaryEdge< 1, Eigen::Vector2d, VertexParams >, and g2o::BaseUnaryEdge< 6, SE3Quat, VertexSE3 >.
Definition at line 68 of file hyper_graph.cpp.
References _vertices.
Referenced by g2o::OptimizableGraph::addGraph(), and g2o::OptimizableGraph::setFixed().
| void g2o::HyperGraph::Edge::setId | ( | int | id | ) |
|
inline |
set the ith vertex on the hyper-edge to the pointer supplied
Definition at line 194 of file hyper_graph.h.
Referenced by g2o::OptimizableGraph::addGraph(), main(), g2o::Gm2dlIO::readGm2dl(), g2o::HyperGraph::setEdgeVertex(), and g2o::OptimizableGraph::setFixed().
|
inline |
returns the pointer to the ith vertex connected to the hyper-edge.
Definition at line 186 of file hyper_graph.h.
Referenced by g2o::OptimizableGraph::addGraph(), g2o::HyperGraph::addVertex(), g2o::OptimizableGraph::addVertex(), g2o::BlockSolver< Traits >::buildStructure(), g2o::BlockSolver< Traits >::buildSystem(), g2o::StructureOnlySolver< PointDoF >::calc(), g2o::HyperGraph::changeId(), g2o::SparseOptimizer::computeInitialGuess(), g2o::HyperGraph::detachVertex(), g2o::Edge_V_V_GICP::Edge_V_V_GICP(), g2o::EdgeSE3PointXYZ::initialEstimate(), g2o::deprecated::EdgeSE3PointXYZDisparity::initialEstimate(), main(), g2o::HyperGraph::mergeVertices(), g2o::UnarySensor< Robot3D, EdgeSE3Prior >::mkEdge(), g2o::BinarySensor< Robot2D, EdgeSE2PointXY, WorldObjectPointXY >::mkEdge(), g2o::EdgeSE2PointXYBearingWriteGnuplotAction::operator()(), g2o::EdgeSE2PointXYWriteGnuplotAction::operator()(), g2o::EdgeSE2WriteGnuplotAction::operator()(), g2o::deprecated::EdgeSE3WriteGnuplotAction::operator()(), g2o::EstimatePropagator::propagate(), g2o::HyperGraph::setEdgeVertex(), g2o::OptimizableGraph::setFixed(), MainWindow::setRobustKernel(), g2o::HyperDijkstra::shortestPaths(), g2o::JacobianWorkspace::updateSize(), g2o::BlockSolver< Traits >::updateStructure(), g2o::OptimizableGraph::verifyInformationMatrices(), g2o::EdgeSE3PlaneSensorCalib::write(), g2o::EdgeSE2OdomDifferentialCalib::write(), g2o::EdgeSE2SensorCalib::write(), and g2o::Gm2dlIO::writeGm2dl().
|
inline |
returns the pointer to the ith vertex connected to the hyper-edge.
Definition at line 190 of file hyper_graph.h.
|
inline |
returns the vector of pointers to the vertices connected by the hyper-edge.
Definition at line 178 of file hyper_graph.h.
Referenced by g2o::G2oSlamInterface::addEdge(), g2o::HyperGraph::addEdge(), g2o::OptimizableGraph::addGraph(), g2o::addOdometryCalibLinksDifferential(), g2o::EdgeLabeler::augmentSparsePattern(), g2o::BlockSolver< Traits >::buildStructure(), g2o::BlockSolver< Traits >::buildSystem(), g2o::StructureOnlySolver< PointDoF >::calc(), g2o::EdgeSE3Line3D::computeError(), g2o::SparseOptimizer::computeInitialGuess(), g2o::computeSimpleStars(), g2o::EdgeCreator::createEdge(), g2o::HyperGraph::detachVertex(), g2o::OptimizableGraph::dimensions(), g2o::edgeAllVertsSameDim(), g2o::BackBoneTreeAction::fillStar(), g2o::findConnectedEdgesWithCostLimit(), g2o::SparseOptimizer::gaugeFreedom(), g2o::SparseOptimizerOnline::gnuplotVisualization(), g2o::EdgeSE3PointXYZDisparity::initialEstimate(), g2o::SparseOptimizer::initializeOptimization(), g2o::EdgeLabeler::labelEdge(), g2o::Star::labelStarEdges(), main(), g2o::OptimizableGraph::maxDimension(), g2o::HyperGraph::mergeVertices(), g2o::UnarySensor< Robot3D, EdgeSE3Prior >::mkEdge(), g2o::BinarySensor< Robot2D, EdgeSE2PointXY, WorldObjectPointXY >::mkEdge(), Robot::move(), g2o::EdgeSE3WriteGnuplotAction::operator()(), g2o::SparseOptimizerIncremental::optimize(), g2o::ThetaTreeAction::perform(), g2o::EstimatePropagator::propagate(), g2o::HyperGraph::removeEdge(), g2o::OptimizableGraph::save(), g2o::OptimizableGraph::saveEdge(), g2o::saveGnuplot(), PlaneSensor::sense(), g2o::OptimizableGraph::setFixed(), MainWindow::setRobustKernel(), g2o::HyperDijkstra::shortestPaths(), g2o::SolverSLAM2DLinear::solveOrientation(), g2o::starsInEdge(), g2o::SparseOptimizerIncremental::updateInitialization(), g2o::JacobianWorkspace::updateSize(), g2o::BlockSolver< Traits >::updateStructure(), and g2o::OptimizableGraph::verifyInformationMatrices().
|
inline |
returns the vector of pointers to the vertices connected by the hyper-edge.
Definition at line 182 of file hyper_graph.h.
|
protected |
|
protected |
Definition at line 202 of file hyper_graph.h.
Referenced by g2o::HyperGraph::addVertex(), g2o::HyperGraph::changeId(), g2o::HyperGraph::clear(), g2o::EdgeSE2TwoPointsXY::computeError(), g2o::EdgeSE3::computeError(), g2o::EdgeSE3LotsOfXYZ::computeError(), g2o::EdgeSE2LotsOfXY::computeError(), g2o::EdgeLine2DPointXY::computeError(), g2o::EdgeSE3Calib::computeError(), g2o::EdgeSE2Segment2D::computeError(), g2o::tutorial::EdgeSE2PointXY::computeError(), g2o::EdgeSE3PointXYZDepth::computeError(), g2o::EdgeSE3PointXYZ::computeError(), g2o::deprecated::EdgeSE3PointXYZDepth::computeError(), g2o::EdgeSE2Segment2DLine::computeError(), g2o::EdgeSE2PointXYOffset::computeError(), g2o::deprecated::EdgeSE3PointXYZ::computeError(), g2o::EdgeSE3PointXYZDisparity::computeError(), g2o::EdgeSE2PureCalib::computeError(), g2o::deprecated::EdgeSE3PointXYZDisparity::computeError(), g2o::EdgeProjectPSI2UV::computeError(), g2o::BaseUnaryEdge< D, E, VertexXi >::constructQuadraticForm(), g2o::BaseBinaryEdge< D, E, VertexXi, VertexXj >::constructQuadraticForm(), g2o::HyperGraph::detachVertex(), g2o::OptimizableGraph::discardTop(), g2o::Edge_V_V_GICP::Edge_V_V_GICP(), g2o::OptimizableGraph::Edge::graph(), g2o::EdgeSE2TwoPointsXY::initialEstimate(), g2o::EdgeSE3LotsOfXYZ::initialEstimate(), g2o::EdgeSE2LotsOfXY::initialEstimate(), g2o::EdgeSE3::initialEstimate(), g2o::EdgeSE2PointXYCalib::initialEstimate(), g2o::EdgeSE3Offset::initialEstimate(), g2o::EdgeSE2SensorCalib::initialEstimate(), g2o::EdgeSE2PointXY::initialEstimate(), g2o::EdgeSE2Prior::initialEstimate(), g2o::EdgeSE2PointXYBearing::initialEstimate(), g2o::deprecated::EdgeSE3Prior::initialEstimate(), g2o::EdgeSE3Prior::initialEstimate(), g2o::EdgeSE3PointXYZDepth::initialEstimate(), g2o::EdgeSE3PointXYZ::initialEstimate(), g2o::deprecated::EdgeSE3PointXYZDepth::initialEstimate(), g2o::deprecated::EdgeSE3PointXYZ::initialEstimate(), g2o::EdgeSE2Offset::initialEstimate(), g2o::EdgeSE2PointXYOffset::initialEstimate(), g2o::deprecated::EdgeSE3Offset::initialEstimate(), g2o::EdgeSE3PointXYZDisparity::initialEstimate(), g2o::deprecated::EdgeSE3PointXYZDisparity::initialEstimate(), g2o::EdgeSE2::initialEstimate(), g2o::EdgeSE2Segment2D::initialEstimate(), g2o::EdgeSE2Line2D::initialEstimate(), g2o::deprecated::EdgeSE3::initialEstimate(), g2o::EdgeSBACam::initialEstimate(), g2o::EdgeSBAScale::initialEstimate(), g2o::EdgeSE2TwoPointsXY::initialEstimatePossible(), g2o::EdgeSE3LotsOfXYZ::initialEstimatePossible(), g2o::EdgeSE2LotsOfXY::initialEstimatePossible(), g2o::EdgeSE2Segment2D::initialEstimatePossible(), g2o::EdgeSE3::linearizeOplus(), g2o::EdgeSE3LotsOfXYZ::linearizeOplus(), g2o::EdgeSE2LotsOfXY::linearizeOplus(), g2o::deprecated::EdgeSE3Prior::linearizeOplus(), g2o::EdgeSE3PointXYZDepth::linearizeOplus(), g2o::EdgeSE3Prior::linearizeOplus(), g2o::EdgeSE3PointXYZ::linearizeOplus(), g2o::deprecated::EdgeSE3PointXYZDepth::linearizeOplus(), g2o::EdgeSE2PointXYOffset::linearizeOplus(), g2o::EdgeSE3Offset::linearizeOplus(), g2o::deprecated::EdgeSE3PointXYZ::linearizeOplus(), g2o::EdgeSE3PointXYZDisparity::linearizeOplus(), g2o::deprecated::EdgeSE3PointXYZDisparity::linearizeOplus(), g2o::deprecated::EdgeSE3Offset::linearizeOplus(), g2o::EdgeSE2PointXY::linearizeOplus(), g2o::EdgeSE2::linearizeOplus(), g2o::deprecated::EdgeSE3::linearizeOplus(), g2o::EdgeSE3Expmap::linearizeOplus(), g2o::EdgeProjectXYZ2UV::linearizeOplus(), g2o::EdgeProjectPSI2UV::linearizeOplus(), g2o::EdgeProjectP2MC::linearizeOplus(), g2o::Edge_V_V_GICP::linearizeOplus(), g2o::EdgeProjectP2SC::linearizeOplus(), g2o::EdgeProjectP2MC_Intrinsics::linearizeOplus(), g2o::HyperGraph::mergeVertices(), numUndefinedVertices(), g2o::OptimizableGraph::pop(), g2o::OptimizableGraph::push(), g2o::HyperGraph::removeVertex(), resize(), g2o::tutorial::EdgeSE2PointXY::resolveCaches(), g2o::EdgeSE3Offset::resolveCaches(), g2o::EdgeSE3Line3D::resolveCaches(), g2o::deprecated::EdgeSE3Prior::resolveCaches(), g2o::EdgeSE3Prior::resolveCaches(), g2o::EdgeSE3PointXYZDepth::resolveCaches(), g2o::EdgeSE2Offset::resolveCaches(), g2o::deprecated::EdgeSE3PointXYZDepth::resolveCaches(), g2o::EdgeSE2PointXYOffset::resolveCaches(), g2o::deprecated::EdgeSE3PointXYZ::resolveCaches(), g2o::EdgeSE3PointXYZ::resolveCaches(), g2o::deprecated::EdgeSE3Offset::resolveCaches(), g2o::deprecated::EdgeSE3PointXYZDisparity::resolveCaches(), g2o::EdgeSE3PointXYZDisparity::resolveCaches(), g2o::EdgeSE2TwoPointsXY::setMeasurementFromState(), g2o::EdgeSE3LotsOfXYZ::setMeasurementFromState(), g2o::EdgeSE2LotsOfXY::setMeasurementFromState(), g2o::EdgeSE3::setMeasurementFromState(), g2o::EdgeLine2DPointXY::setMeasurementFromState(), g2o::EdgeSE3PointXYZDepth::setMeasurementFromState(), g2o::EdgeSE3PointXYZ::setMeasurementFromState(), g2o::deprecated::EdgeSE3PointXYZDepth::setMeasurementFromState(), g2o::deprecated::EdgeSE3PointXYZ::setMeasurementFromState(), g2o::EdgeSE2PointXYOffset::setMeasurementFromState(), g2o::EdgeSE2Segment2D::setMeasurementFromState(), g2o::EdgeSE3PointXYZDisparity::setMeasurementFromState(), g2o::deprecated::EdgeSE3PointXYZDisparity::setMeasurementFromState(), g2o::EdgeSE2Segment2DLine::setMeasurementFromState(), g2o::deprecated::EdgeSE3::setMeasurementFromState(), g2o::EdgeSBACam::setMeasurementFromState(), and g2o::HyperGraph::vertex().
 1.8.11
1.8.11

