|
g2o
|
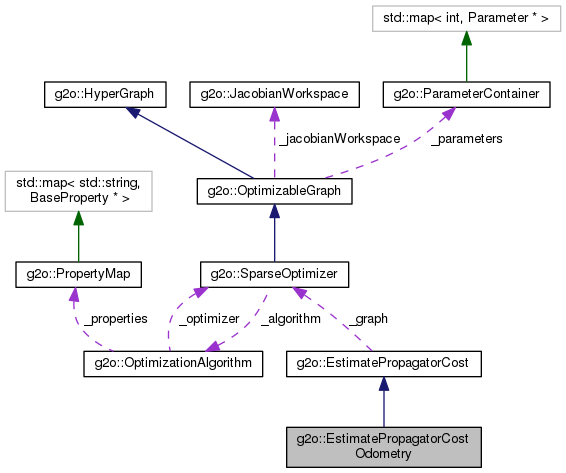
cost for traversing only odometry edges. More...
#include <estimate_propagator.h>
Public Member Functions | |
| EstimatePropagatorCostOdometry (SparseOptimizer *graph) | |
| virtual double | operator() (OptimizableGraph::Edge *edge, const OptimizableGraph::VertexSet &from_, OptimizableGraph::Vertex *to_) const |
| virtual const char * | name () const |
 Public Member Functions inherited from g2o::EstimatePropagatorCost Public Member Functions inherited from g2o::EstimatePropagatorCost | |
| EstimatePropagatorCost (SparseOptimizer *graph) | |
Additional Inherited Members | |
| Protected Attributes inherited from g2o::EstimatePropagatorCost | |
| SparseOptimizer * | _graph |
cost for traversing only odometry edges.
Initialize your graph along odometry edges. An odometry edge is assumed to connect vertices whose IDs only differs by one.
Definition at line 62 of file estimate_propagator.h.
| g2o::EstimatePropagatorCostOdometry::EstimatePropagatorCostOdometry | ( | SparseOptimizer * | graph | ) |
Definition at line 252 of file estimate_propagator.cpp.
|
inlinevirtual |
Reimplemented from g2o::EstimatePropagatorCost.
Definition at line 66 of file estimate_propagator.h.
|
virtual |
Reimplemented from g2o::EstimatePropagatorCost.
Definition at line 257 of file estimate_propagator.cpp.
References g2o::EstimatePropagatorCost::_graph, g2o::SparseOptimizer::activeEdges(), g2o::SparseOptimizer::findActiveEdge(), g2o::HyperGraph::Vertex::id(), and g2o::OptimizableGraph::Edge::initialEstimatePossible().
 1.8.11
1.8.11

