|
g2o
|
laser measurement obtained by a robot More...
#include <robot_laser.h>
Public Member Functions | |
| RobotLaser () | |
| ~RobotLaser () | |
| virtual bool | write (std::ostream &os) const |
| write the data to a stream More... | |
| virtual bool | read (std::istream &is) |
| read the data from a stream More... | |
| SE2 | laserPose () const |
| const SE2 & | odomPose () const |
| void | setOdomPose (const SE2 &odomPose) |
 Public Member Functions inherited from g2o::RawLaser Public Member Functions inherited from g2o::RawLaser | |
| RawLaser () | |
| ~RawLaser () | |
| Point2DVector | cartesian () const |
| const std::vector< double > & | ranges () const |
| the range measurements by the laser More... | |
| void | setRanges (const std::vector< double > &ranges) |
| const std::vector< double > & | remissions () const |
| the remission measurements by the laser More... | |
| void | setRemissions (const std::vector< double > &remissions) |
| const LaserParameters & | laserParams () const |
| the parameters of the laser More... | |
| void | setLaserParams (const LaserParameters &laserParams) |
| Public Member Functions inherited from g2o::RobotData | |
| RobotData () | |
| virtual | ~RobotData () |
| double | timestamp () const |
| void | setTimestamp (double ts) |
| double | loggerTimestamp () const |
| void | setLoggerTimestamp (double ts) |
| const std::string & | tag () const |
| void | setTag (const std::string &tag) |
| const std::string & | hostname () const |
| void | setHostname (const std::string &hostname) |
| Public Member Functions inherited from g2o::HyperGraph::Data | |
| Data () | |
| ~Data () | |
| virtual HyperGraph::HyperGraphElementType | elementType () const |
| const Data * | next () const |
| Data * | next () |
| void | setNext (Data *next_) |
| DataContainer * | dataContainer () |
| const DataContainer * | dataContainer () const |
| void | setDataContainer (DataContainer *dataContainer_) |
| Public Member Functions inherited from g2o::HyperGraph::HyperGraphElement | |
| virtual | ~HyperGraphElement () |
| HyperGraphElement * | clone () const |
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | |
Protected Attributes | |
| SE2 | _odomPose |
| double | _laserTv |
| velocities and safety distances of the robot. More... | |
| double | _laserRv |
| double | _forwardSafetyDist |
| double | _sideSaftyDist |
| double | _turnAxis |
| Protected Attributes inherited from g2o::RawLaser | |
| std::vector< double > | _ranges |
| std::vector< double > | _remissions |
| LaserParameters | _laserParams |
| Protected Attributes inherited from g2o::RobotData | |
| double | _timestamp |
| timestamp when the measurement was generated More... | |
| double | _loggerTimestamp |
| timestamp when the measurement was recorded More... | |
| std::string | _tag |
| string tag (FLASER, ROBOTLASER, ODOM..) of the line in the log More... | |
| std::string | _hostname |
| name of the computer/robot generating the data More... | |
| Protected Attributes inherited from g2o::HyperGraph::Data | |
| Data * | _next |
| DataContainer * | _dataContainer |
Additional Inherited Members | |
| Public Types inherited from g2o::RawLaser | |
| typedef std::vector< Vector2D, Eigen::aligned_allocator< Vector2D > > | Point2DVector |
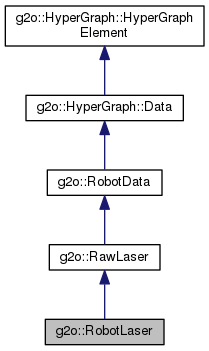
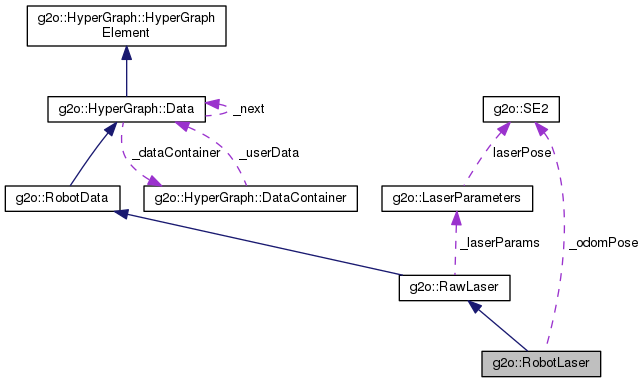
laser measurement obtained by a robot
A laser measurement obtained by a robot. The measurement is equipped with a pose of the robot at which the measurement was taken. The read/write function correspond to the CARMEN logfile format.
Definition at line 42 of file robot_laser.h.
| g2o::RobotLaser::RobotLaser | ( | ) |
Definition at line 40 of file robot_laser.cpp.
| g2o::RobotLaser::~RobotLaser | ( | ) |
Definition at line 46 of file robot_laser.cpp.
|
inline |
|
inline |
Definition at line 53 of file robot_laser.h.
Referenced by g2o::addOdometryCalibLinksDifferential(), main(), and setOdomPose().
|
virtual |
read the data from a stream
Reimplemented from g2o::RawLaser.
Definition at line 50 of file robot_laser.cpp.
References _forwardSafetyDist, g2o::RobotData::_hostname, g2o::RawLaser::_laserParams, _laserRv, _laserTv, g2o::RobotData::_loggerTimestamp, _odomPose, g2o::RawLaser::_ranges, g2o::RawLaser::_remissions, _sideSaftyDist, g2o::RobotData::_timestamp, _turnAxis, g2o::SE2::inverse(), and g2o::LaserParameters::laserPose.
Referenced by g2o::Gm2dlIO::readGm2dl(), and g2o::Gm2dlIO::readRobotLaser().
| void g2o::RobotLaser::setOdomPose | ( | const SE2 & | odomPose | ) |
Definition at line 113 of file robot_laser.cpp.
References _odomPose, g2o::RawLaser::cartesian(), g2o::RawLaser::laserParams(), g2o::LaserParameters::laserPose, laserPose(), odomPose(), RAD2DEG, g2o::DrawAction::refreshPropertyPtrs(), g2o::SE2::rotation(), step(), and g2o::SE2::translation().
Referenced by g2o::Gm2dlIO::updateLaserData().
|
virtual |
write the data to a stream
Reimplemented from g2o::RawLaser.
Definition at line 87 of file robot_laser.cpp.
References _forwardSafetyDist, g2o::RawLaser::_laserParams, _laserRv, _laserTv, _odomPose, g2o::RawLaser::_remissions, _sideSaftyDist, _turnAxis, g2o::LaserParameters::accuracy, g2o::LaserParameters::angularStep, g2o::LaserParameters::firstBeamAngle, g2o::LaserParameters::fov, g2o::RobotData::hostname(), g2o::LaserParameters::laserPose, g2o::RobotData::loggerTimestamp(), g2o::LaserParameters::maxRange, g2o::RawLaser::ranges(), g2o::LaserParameters::remissionMode, g2o::RobotData::timestamp(), g2o::SE2::toVector(), and g2o::LaserParameters::type.
|
protected |
Definition at line 59 of file robot_laser.h.
|
protected |
Definition at line 59 of file robot_laser.h.
|
protected |
velocities and safety distances of the robot.
Definition at line 59 of file robot_laser.h.
|
protected |
Definition at line 57 of file robot_laser.h.
Referenced by read(), setOdomPose(), and write().
|
protected |
Definition at line 59 of file robot_laser.h.
|
protected |
Definition at line 59 of file robot_laser.h.
| g2o::RobotLaser::EIGEN_MAKE_ALIGNED_OPERATOR_NEW |
Definition at line 45 of file robot_laser.h.
 1.8.11
1.8.11

