|
g2o
|
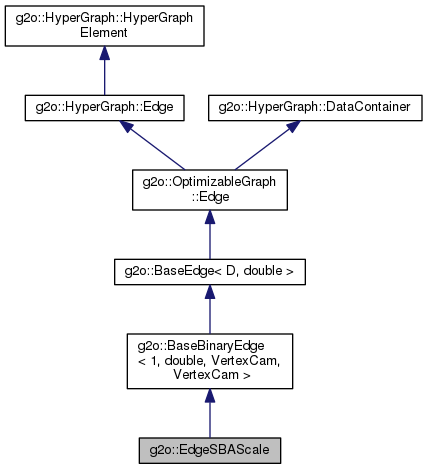
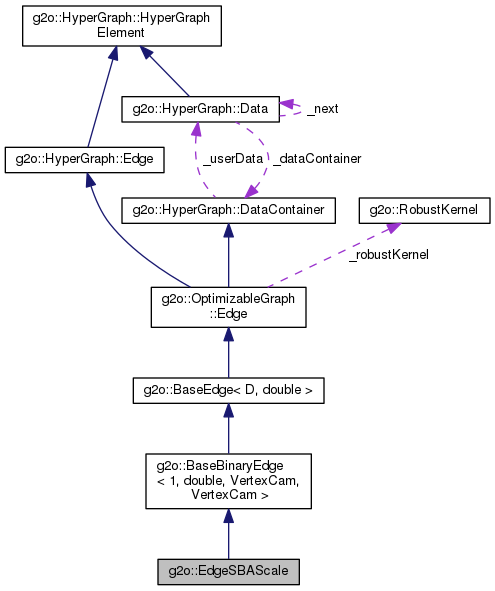
edge between two SBAcam that specifies the distance between them More...
#include <types_sba.h>
Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | EdgeSBAScale () |
| virtual bool | read (std::istream &is) |
| read the vertex from a stream, i.e., the internal state of the vertex More... | |
| virtual bool | write (std::ostream &os) const |
| write the vertex to a stream More... | |
| void | computeError () |
| virtual void | setMeasurement (const double &m) |
| virtual double | initialEstimatePossible (const OptimizableGraph::VertexSet &, OptimizableGraph::Vertex *) |
| virtual void | initialEstimate (const OptimizableGraph::VertexSet &from_, OptimizableGraph::Vertex *to_) |
 Public Member Functions inherited from g2o::BaseBinaryEdge< 1, double, VertexCam, VertexCam > Public Member Functions inherited from g2o::BaseBinaryEdge< 1, double, VertexCam, VertexCam > | |
| BaseBinaryEdge () | |
| virtual OptimizableGraph::Vertex * | createFrom () |
| virtual OptimizableGraph::Vertex * | createTo () |
| virtual OptimizableGraph::Vertex * | createVertex (int i) |
| virtual void | resize (size_t size) |
| virtual bool | allVerticesFixed () const |
| virtual void | linearizeOplus (JacobianWorkspace &jacobianWorkspace) |
| virtual void | linearizeOplus () |
| const JacobianXiOplusType & | jacobianOplusXi () const |
| returns the result of the linearization in the manifold space for the node xi More... | |
| const JacobianXjOplusType & | jacobianOplusXj () const |
| returns the result of the linearization in the manifold space for the node xj More... | |
| virtual void | constructQuadraticForm () |
| virtual void | mapHessianMemory (double *d, int i, int j, bool rowMajor) |
| Public Member Functions inherited from g2o::BaseEdge< D, double > | |
| BaseEdge () | |
| virtual | ~BaseEdge () |
| virtual double | chi2 () const |
| computes the chi2 based on the cached error value, only valid after computeError has been called. More... | |
| virtual const double * | errorData () const |
| returns the error vector cached after calling the computeError; More... | |
| virtual double * | errorData () |
| const ErrorVector & | error () const |
| ErrorVector & | error () |
| EIGEN_STRONG_INLINE const InformationType & | information () const |
| information matrix of the constraint More... | |
| EIGEN_STRONG_INLINE InformationType & | information () |
| EIGEN_STRONG_INLINE void | setInformation (const InformationType &information) |
| virtual const double * | informationData () const |
| returns the memory of the information matrix, usable for example with a Eigen::Map<MatrixXD> More... | |
| virtual double * | informationData () |
| EIGEN_STRONG_INLINE const Measurement & | measurement () const |
| accessor functions for the measurement represented by the edge More... | |
| virtual int | rank () const |
| Public Member Functions inherited from g2o::OptimizableGraph::Edge | |
| Edge () | |
| virtual | ~Edge () |
| virtual Edge * | clone () const |
| virtual bool | setMeasurementData (const double *m) |
| virtual bool | getMeasurementData (double *m) const |
| virtual int | measurementDimension () const |
| virtual bool | setMeasurementFromState () |
| RobustKernel * | robustKernel () const |
| if NOT NULL, error of this edge will be robustifed with the kernel More... | |
| void | setRobustKernel (RobustKernel *ptr) |
| int | level () const |
| returns the level of the edge More... | |
| void | setLevel (int l) |
| sets the level of the edge More... | |
| int | dimension () const |
| returns the dimensions of the error function More... | |
| G2O_ATTRIBUTE_DEPRECATED (virtual Vertex *createFrom()) | |
| G2O_ATTRIBUTE_DEPRECATED (virtual Vertex *createTo()) | |
| long long | internalId () const |
| the internal ID of the edge More... | |
| OptimizableGraph * | graph () |
| const OptimizableGraph * | graph () const |
| bool | setParameterId (int argNum, int paramId) |
| const Parameter * | parameter (int argNo) const |
| size_t | numParameters () const |
| void | resizeParameters (size_t newSize) |
| Public Member Functions inherited from g2o::HyperGraph::Edge | |
| Edge (int id=InvalidId) | |
| creates and empty edge with no vertices More... | |
| const VertexContainer & | vertices () const |
| VertexContainer & | vertices () |
| const Vertex * | vertex (size_t i) const |
| Vertex * | vertex (size_t i) |
| void | setVertex (size_t i, Vertex *v) |
| int | id () const |
| void | setId (int id) |
| virtual HyperGraphElementType | elementType () const |
| int | numUndefinedVertices () const |
| Public Member Functions inherited from g2o::HyperGraph::HyperGraphElement | |
| virtual | ~HyperGraphElement () |
| HyperGraphElement * | clone () const |
| Public Member Functions inherited from g2o::HyperGraph::DataContainer | |
| DataContainer () | |
| virtual | ~DataContainer () |
| const Data * | userData () const |
| the user data associated with this vertex More... | |
| Data * | userData () |
| void | setUserData (Data *obs) |
| void | addUserData (Data *obs) |
Additional Inherited Members | |
| Public Types inherited from g2o::BaseBinaryEdge< 1, double, VertexCam, VertexCam > | |
| typedef VertexCam | VertexXiType |
| typedef VertexCam | VertexXjType |
| typedef BaseEdge< D, double >::Measurement | Measurement |
| typedef Eigen::Matrix< double, D, Di, D==1?Eigen::RowMajor:Eigen::ColMajor >::AlignedMapType | JacobianXiOplusType |
| typedef Eigen::Matrix< double, D, Dj, D==1?Eigen::RowMajor:Eigen::ColMajor >::AlignedMapType | JacobianXjOplusType |
| typedef BaseEdge< D, double >::ErrorVector | ErrorVector |
| typedef BaseEdge< D, double >::InformationType | InformationType |
| typedef Eigen::Map< Eigen::Matrix< double, Di, Dj, Di==1?Eigen::RowMajor:Eigen::ColMajor >, Eigen::Matrix< double, Di, Dj, Di==1?Eigen::RowMajor:Eigen::ColMajor >::Flags &Eigen::AlignedBit?Eigen::Aligned:Eigen::Unaligned > | HessianBlockType |
| typedef Eigen::Map< Eigen::Matrix< double, Dj, Di, Dj==1?Eigen::RowMajor:Eigen::ColMajor >, Eigen::Matrix< double, Dj, Di, Dj==1?Eigen::RowMajor:Eigen::ColMajor >::Flags &Eigen::AlignedBit?Eigen::Aligned:Eigen::Unaligned > | HessianBlockTransposedType |
| Public Types inherited from g2o::BaseEdge< D, double > | |
| typedef double | Measurement |
| typedef Eigen::Matrix< double, D, 1, Eigen::ColMajor > | ErrorVector |
| typedef Eigen::Matrix< double, D, D, Eigen::ColMajor > | InformationType |
| Static Public Attributes inherited from g2o::BaseBinaryEdge< 1, double, VertexCam, VertexCam > | |
| static const int | Di |
| static const int | Dj |
| static const int | Dimension |
| Static Public Attributes inherited from g2o::BaseEdge< D, double > | |
| static const int | Dimension |
| Protected Member Functions inherited from g2o::BaseEdge< D, double > | |
| InformationType | robustInformation (const Vector3D &rho) |
| Protected Member Functions inherited from g2o::OptimizableGraph::Edge | |
| template<typename ParameterType > | |
| bool | installParameter (ParameterType *&p, size_t argNo, int paramId=-1) |
| template<typename CacheType > | |
| void | resolveCache (CacheType *&cache, OptimizableGraph::Vertex *, const std::string &_type, const ParameterVector ¶meters) |
| bool | resolveParameters () |
| virtual bool | resolveCaches () |
| Protected Attributes inherited from g2o::BaseBinaryEdge< 1, double, VertexCam, VertexCam > | |
| bool | _hessianRowMajor |
| HessianBlockType | _hessian |
| HessianBlockTransposedType | _hessianTransposed |
| JacobianXiOplusType | _jacobianOplusXi |
| JacobianXjOplusType | _jacobianOplusXj |
| Protected Attributes inherited from g2o::BaseEdge< D, double > | |
| Measurement | _measurement |
| InformationType | _information |
| ErrorVector | _error |
| Protected Attributes inherited from g2o::OptimizableGraph::Edge | |
| int | _dimension |
| int | _level |
| RobustKernel * | _robustKernel |
| long long | _internalId |
| std::vector< int > | _cacheIds |
| std::vector< std::string > | _parameterTypes |
| std::vector< Parameter ** > | _parameters |
| std::vector< int > | _parameterIds |
| Protected Attributes inherited from g2o::HyperGraph::Edge | |
| VertexContainer | _vertices |
| int | _id |
| unique id More... | |
| Protected Attributes inherited from g2o::HyperGraph::DataContainer | |
| Data * | _userData |
edge between two SBAcam that specifies the distance between them
Definition at line 338 of file types_sba.h.
| g2o::EdgeSBAScale::EdgeSBAScale | ( | ) |
Definition at line 524 of file types_sba.cpp.
|
inlinevirtual |
Implements g2o::OptimizableGraph::Edge.
Definition at line 345 of file types_sba.h.
References g2o::BaseVertex< D, T >::estimate(), and g2o::SE3Quat::translation().
|
virtual |
set the estimate of the to vertex, based on the estimate of the from vertices in the edge.
Reimplemented from g2o::BaseEdge< D, double >.
Definition at line 545 of file types_sba.cpp.
References g2o::BaseEdge< D, double >::_measurement, g2o::HyperGraph::Edge::_vertices, g2o::BaseVertex< D, T >::estimate(), g2o::SE3Quat::inverse(), g2o::VertexCam::setEstimate(), g2o::SE3Quat::setTranslation(), and g2o::SE3Quat::translation().
|
inlinevirtual |
override in your class if it's possible to initialize the vertices in certain combinations. The return value may correspond to the cost for initiliaizng the vertex but should be positive if the initialization is possible and negative if not possible.
Reimplemented from g2o::OptimizableGraph::Edge.
Definition at line 355 of file types_sba.h.
|
virtual |
read the vertex from a stream, i.e., the internal state of the vertex
Implements g2o::OptimizableGraph::Edge.
Definition at line 529 of file types_sba.cpp.
References g2o::BaseEdge< D, double >::information(), and setMeasurement().
|
inlinevirtual |
Reimplemented from g2o::BaseEdge< D, double >.
Definition at line 352 of file types_sba.h.
Referenced by read().
|
virtual |
write the vertex to a stream
Implements g2o::OptimizableGraph::Edge.
Definition at line 539 of file types_sba.cpp.
References g2o::BaseEdge< D, double >::information(), and g2o::BaseEdge< D, double >::measurement().
 1.8.11
1.8.11

