|
g2o
|
#include <targetTypes6D.hpp>
Public Member Functions | |
| GPSObservationEdgePositionVelocity3D (const Eigen::Vector3d &measurement, double noiseSigma) | |
| void | computeError () |
| virtual bool | read (std::istream &) |
| read the vertex from a stream, i.e., the internal state of the vertex More... | |
| virtual bool | write (std::ostream &) const |
| write the vertex to a stream More... | |
 Public Member Functions inherited from g2o::BaseUnaryEdge< 3, Eigen::Vector3d, VertexPositionVelocity3D > Public Member Functions inherited from g2o::BaseUnaryEdge< 3, Eigen::Vector3d, VertexPositionVelocity3D > | |
| BaseUnaryEdge () | |
| virtual void | resize (size_t size) |
| virtual bool | allVerticesFixed () const |
| virtual void | linearizeOplus (JacobianWorkspace &jacobianWorkspace) |
| virtual void | linearizeOplus () |
| virtual OptimizableGraph::Vertex * | createVertex (int i) |
| const JacobianXiOplusType & | jacobianOplusXi () const |
| returns the result of the linearization in the manifold space for the node xi More... | |
| virtual void | constructQuadraticForm () |
| virtual void | initialEstimate (const OptimizableGraph::VertexSet &from, OptimizableGraph::Vertex *to) |
| virtual void | mapHessianMemory (double *, int, int, bool) |
| Public Member Functions inherited from g2o::BaseEdge< D, Eigen::Vector3d > | |
| BaseEdge () | |
| virtual | ~BaseEdge () |
| virtual double | chi2 () const |
| computes the chi2 based on the cached error value, only valid after computeError has been called. More... | |
| virtual const double * | errorData () const |
| returns the error vector cached after calling the computeError; More... | |
| virtual double * | errorData () |
| const ErrorVector & | error () const |
| ErrorVector & | error () |
| EIGEN_STRONG_INLINE const InformationType & | information () const |
| information matrix of the constraint More... | |
| EIGEN_STRONG_INLINE InformationType & | information () |
| EIGEN_STRONG_INLINE void | setInformation (const InformationType &information) |
| virtual const double * | informationData () const |
| returns the memory of the information matrix, usable for example with a Eigen::Map<MatrixXD> More... | |
| virtual double * | informationData () |
| EIGEN_STRONG_INLINE const Measurement & | measurement () const |
| accessor functions for the measurement represented by the edge More... | |
| virtual void | setMeasurement (const Measurement &m) |
| virtual int | rank () const |
| Public Member Functions inherited from g2o::OptimizableGraph::Edge | |
| Edge () | |
| virtual | ~Edge () |
| virtual Edge * | clone () const |
| virtual bool | setMeasurementData (const double *m) |
| virtual bool | getMeasurementData (double *m) const |
| virtual int | measurementDimension () const |
| virtual bool | setMeasurementFromState () |
| RobustKernel * | robustKernel () const |
| if NOT NULL, error of this edge will be robustifed with the kernel More... | |
| void | setRobustKernel (RobustKernel *ptr) |
| virtual double | initialEstimatePossible (const OptimizableGraph::VertexSet &from, OptimizableGraph::Vertex *to) |
| int | level () const |
| returns the level of the edge More... | |
| void | setLevel (int l) |
| sets the level of the edge More... | |
| int | dimension () const |
| returns the dimensions of the error function More... | |
| G2O_ATTRIBUTE_DEPRECATED (virtual Vertex *createFrom()) | |
| G2O_ATTRIBUTE_DEPRECATED (virtual Vertex *createTo()) | |
| long long | internalId () const |
| the internal ID of the edge More... | |
| OptimizableGraph * | graph () |
| const OptimizableGraph * | graph () const |
| bool | setParameterId (int argNum, int paramId) |
| const Parameter * | parameter (int argNo) const |
| size_t | numParameters () const |
| void | resizeParameters (size_t newSize) |
| Public Member Functions inherited from g2o::HyperGraph::Edge | |
| Edge (int id=InvalidId) | |
| creates and empty edge with no vertices More... | |
| const VertexContainer & | vertices () const |
| VertexContainer & | vertices () |
| const Vertex * | vertex (size_t i) const |
| Vertex * | vertex (size_t i) |
| void | setVertex (size_t i, Vertex *v) |
| int | id () const |
| void | setId (int id) |
| virtual HyperGraphElementType | elementType () const |
| int | numUndefinedVertices () const |
| Public Member Functions inherited from g2o::HyperGraph::HyperGraphElement | |
| virtual | ~HyperGraphElement () |
| HyperGraphElement * | clone () const |
| Public Member Functions inherited from g2o::HyperGraph::DataContainer | |
| DataContainer () | |
| virtual | ~DataContainer () |
| const Data * | userData () const |
| the user data associated with this vertex More... | |
| Data * | userData () |
| void | setUserData (Data *obs) |
| void | addUserData (Data *obs) |
Additional Inherited Members | |
| Public Types inherited from g2o::BaseUnaryEdge< 3, Eigen::Vector3d, VertexPositionVelocity3D > | |
| typedef BaseEdge< D, Eigen::Vector3d >::Measurement | Measurement |
| typedef VertexPositionVelocity3D | VertexXiType |
| typedef Eigen::Matrix< double, D, VertexXiType::Dimension, D==1?Eigen::RowMajor:Eigen::ColMajor >::AlignedMapType | JacobianXiOplusType |
| typedef BaseEdge< D, Eigen::Vector3d >::ErrorVector | ErrorVector |
| typedef BaseEdge< D, Eigen::Vector3d >::InformationType | InformationType |
| Public Types inherited from g2o::BaseEdge< D, Eigen::Vector3d > | |
| typedef Eigen::Vector3d | Measurement |
| typedef Eigen::Matrix< double, D, 1, Eigen::ColMajor > | ErrorVector |
| typedef Eigen::Matrix< double, D, D, Eigen::ColMajor > | InformationType |
| Static Public Attributes inherited from g2o::BaseUnaryEdge< 3, Eigen::Vector3d, VertexPositionVelocity3D > | |
| static const int | Dimension |
| Static Public Attributes inherited from g2o::BaseEdge< D, Eigen::Vector3d > | |
| static const int | Dimension |
| Protected Member Functions inherited from g2o::BaseEdge< D, Eigen::Vector3d > | |
| InformationType | robustInformation (const Vector3D &rho) |
| Protected Member Functions inherited from g2o::OptimizableGraph::Edge | |
| template<typename ParameterType > | |
| bool | installParameter (ParameterType *&p, size_t argNo, int paramId=-1) |
| template<typename CacheType > | |
| void | resolveCache (CacheType *&cache, OptimizableGraph::Vertex *, const std::string &_type, const ParameterVector ¶meters) |
| bool | resolveParameters () |
| virtual bool | resolveCaches () |
| Protected Attributes inherited from g2o::BaseUnaryEdge< 3, Eigen::Vector3d, VertexPositionVelocity3D > | |
| JacobianXiOplusType | _jacobianOplusXi |
| Protected Attributes inherited from g2o::BaseEdge< D, Eigen::Vector3d > | |
| Measurement | _measurement |
| InformationType | _information |
| ErrorVector | _error |
| Protected Attributes inherited from g2o::OptimizableGraph::Edge | |
| int | _dimension |
| int | _level |
| RobustKernel * | _robustKernel |
| long long | _internalId |
| std::vector< int > | _cacheIds |
| std::vector< std::string > | _parameterTypes |
| std::vector< Parameter ** > | _parameters |
| std::vector< int > | _parameterIds |
| Protected Attributes inherited from g2o::HyperGraph::Edge | |
| VertexContainer | _vertices |
| int | _id |
| unique id More... | |
| Protected Attributes inherited from g2o::HyperGraph::DataContainer | |
| Data * | _userData |
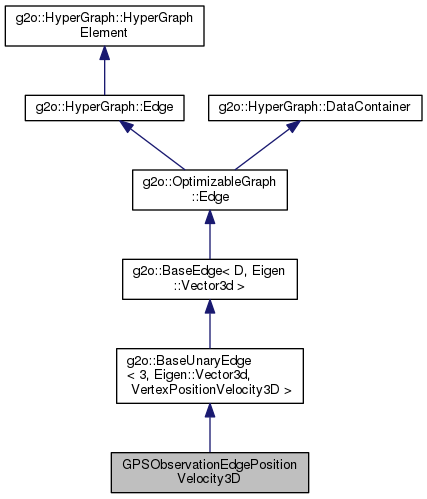
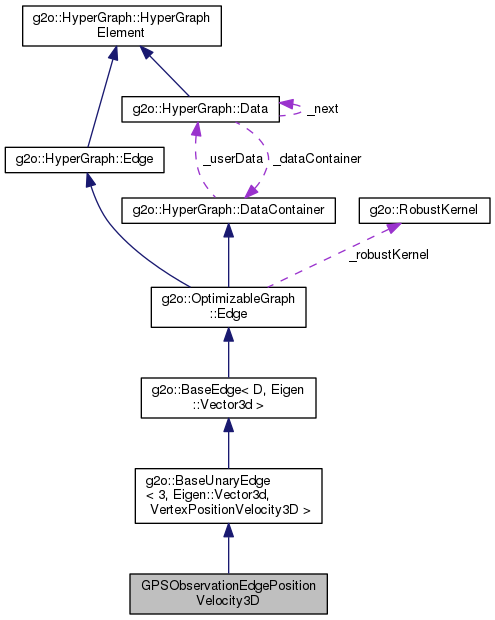
Definition at line 163 of file targetTypes6D.hpp.
|
inline |
Definition at line 166 of file targetTypes6D.hpp.
|
inlinevirtual |
Implements g2o::OptimizableGraph::Edge.
Definition at line 172 of file targetTypes6D.hpp.
References g2o::BaseVertex< D, T >::estimate().
|
inlinevirtual |
read the vertex from a stream, i.e., the internal state of the vertex
Implements g2o::OptimizableGraph::Edge.
Definition at line 181 of file targetTypes6D.hpp.
|
inlinevirtual |
write the vertex to a stream
Implements g2o::OptimizableGraph::Edge.
Definition at line 186 of file targetTypes6D.hpp.
 1.8.11
1.8.11

