|
g2o
|
#include <sensor_se3_prior.h>

Public Member Functions | |
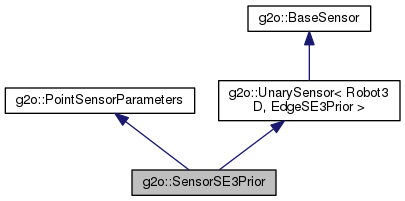
| SensorSE3Prior (const std::string &name_) | |
| virtual void | sense () |
| virtual void | addParameters () |
| ParameterSE3Offset * | offsetParam () |
| void | addNoise (EdgeType *e) |
 Public Member Functions inherited from g2o::PointSensorParameters Public Member Functions inherited from g2o::PointSensorParameters | |
| PointSensorParameters () | |
| double | maxRange () const |
| void | setMaxRange (double maxRange_) |
| double | minRange () const |
| void | setMinRange (double minRange_) |
| double | fov () const |
| void | setFov (double fov_) |
| double | maxAngularDifference () const |
| void | setMaxAngularDifference (double angularDifference) |
| Public Member Functions inherited from g2o::UnarySensor< Robot3D, EdgeSE3Prior > | |
| UnarySensor (const std::string &name) | |
| void | setInformation (const InformationType &information_) |
| const InformationType & | information () |
| Public Member Functions inherited from g2o::BaseSensor | |
| BaseSensor (const std::string &name_) | |
| BaseRobot * | robot () |
| void | setRobot (BaseRobot *robot_) |
| World * | world () |
| OptimizableGraph * | graph () |
| std::vector< Parameter * > | parameters () |
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW typedef PoseVertexType::EstimateType | RobotPoseType |
| Public Attributes inherited from g2o::UnarySensor< Robot3D, EdgeSE3Prior > | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | |
Protected Attributes | |
| RobotPoseType | _sensorPose |
| ParameterSE3Offset * | _offsetParam |
| Protected Attributes inherited from g2o::PointSensorParameters | |
| double | _maxRange2 |
| double | _minRange2 |
| double | _fov |
| double | _maxAngularDifference |
| Protected Attributes inherited from g2o::UnarySensor< Robot3D, EdgeSE3Prior > | |
| PoseObject * | _robotPoseObject |
| InformationType | _information |
| GaussianSampler< typename EdgeType::ErrorVector, InformationType > | _sampler |
| Protected Attributes inherited from g2o::BaseSensor | |
| std::string | _name |
| std::vector< Parameter * > | _parameters |
| BaseRobot * | _robot |
Additional Inherited Members | |
| Public Types inherited from g2o::UnarySensor< Robot3D, EdgeSE3Prior > | |
| typedef Robot3D | RobotType |
| typedef RobotType::PoseObject | PoseObject |
| typedef RobotType::TrajectoryType | TrajectoryType |
| typedef RobotType::PoseObject::VertexType | PoseVertexType |
| typedef EdgeSE3Prior | EdgeType |
| typedef EdgeType::InformationType | InformationType |
| Protected Member Functions inherited from g2o::UnarySensor< Robot3D, EdgeSE3Prior > | |
| EdgeType * | mkEdge () |
Definition at line 35 of file sensor_se3_prior.h.
| g2o::SensorSE3Prior::SensorSE3Prior | ( | const std::string & | name_ | ) |
Definition at line 33 of file sensor_se3_prior.cpp.
References g2o::UnarySensor< Robot3D, EdgeSE3Prior >::_information, _offsetParam, and g2o::UnarySensor< Robot3D, EdgeSE3Prior >::setInformation().
|
virtual |
Reimplemented from g2o::UnarySensor< Robot3D, EdgeSE3Prior >.
Definition at line 49 of file sensor_se3_prior.cpp.
References g2o::UnarySensor< Robot3D, EdgeSE3Prior >::_sampler, g2o::internal::fromVectorMQT(), g2o::GaussianSampler< SampleType, CovarianceType >::generateSample(), g2o::UnarySensor< Robot3D, EdgeSE3Prior >::information(), g2o::BaseEdge< D, E >::measurement(), g2o::BaseEdge< D, E >::setInformation(), and g2o::EdgeSE3Prior::setMeasurement().
Referenced by sense().
|
virtual |
Reimplemented from g2o::BaseSensor.
Definition at line 42 of file sensor_se3_prior.cpp.
References _offsetParam, g2o::World::addParameter(), and g2o::BaseSensor::world().
|
inline |
|
virtual |
Reimplemented from g2o::UnarySensor< Robot3D, EdgeSE3Prior >.
Definition at line 56 of file sensor_se3_prior.cpp.
References _offsetParam, g2o::UnarySensor< Robot3D, EdgeSE3Prior >::_robotPoseObject, _sensorPose, g2o::OptimizableGraph::addEdge(), addNoise(), g2o::BaseSensor::graph(), g2o::Parameter::id(), g2o::UnarySensor< Robot3D, EdgeSE3Prior >::mkEdge(), g2o::ParameterSE3Offset::offset(), g2o::BaseSensor::robot(), g2o::EdgeSE3Prior::setMeasurementFromState(), g2o::OptimizableGraph::Edge::setParameterId(), and g2o::Robot< RobotPoseObject >::trajectory().
|
protected |
Definition at line 46 of file sensor_se3_prior.h.
Referenced by addParameters(), sense(), and SensorSE3Prior().
|
protected |
Definition at line 45 of file sensor_se3_prior.h.
Referenced by sense().
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW typedef PoseVertexType::EstimateType g2o::SensorSE3Prior::RobotPoseType |
Definition at line 38 of file sensor_se3_prior.h.
 1.8.11
1.8.11

