|
g2o
|
#include <simulator.h>
Public Member Functions | |
| BaseSensor (const std::string &name_) | |
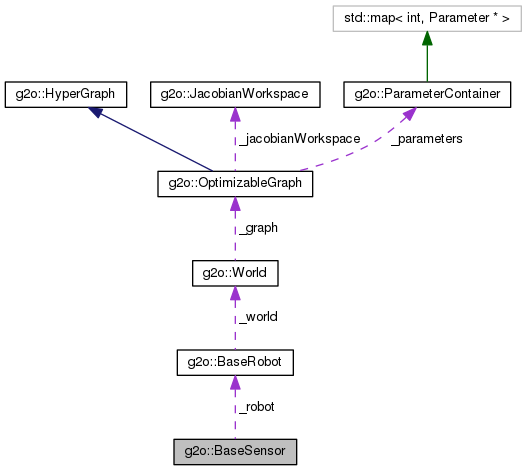
| BaseRobot * | robot () |
| void | setRobot (BaseRobot *robot_) |
| World * | world () |
| OptimizableGraph * | graph () |
| std::vector< Parameter * > | parameters () |
| virtual void | sense ()=0 |
| virtual void | addParameters () |
Protected Attributes | |
| std::string | _name |
| std::vector< Parameter * > | _parameters |
| BaseRobot * | _robot |
Definition at line 126 of file simulator.h.
|
inline |
Definition at line 128 of file simulator.h.
|
inlinevirtual |
Reimplemented in g2o::SensorPointXYOffset, g2o::SensorPointXYZDisparity, g2o::SensorPose3DOffset, g2o::SensorPointLine3D, g2o::SensorPointXYZ, g2o::SensorPointXYZDepth, and g2o::SensorSE3Prior.
Definition at line 135 of file simulator.h.
Referenced by g2o::BaseRobot::addSensor().
| OptimizableGraph * g2o::BaseSensor::graph | ( | ) |
Definition at line 75 of file simulator.cpp.
Referenced by g2o::SensorOdometry< R, E, O >::sense(), g2o::SensorPose3DOffset::sense(), g2o::SensorOdometry2D::sense(), g2o::SensorPose3D::sense(), g2o::SensorOdometry3D::sense(), g2o::SensorPointXY::sense(), g2o::SensorPointXYZDepth::sense(), g2o::SensorPose2D::sense(), g2o::SensorSE3Prior::sense(), g2o::SensorPointXYZ::sense(), g2o::SensorPointXYZDisparity::sense(), g2o::SensorSegment2DPointLine::sense(), g2o::SensorSegment2DLine::sense(), g2o::SensorPointXYOffset::sense(), g2o::SensorSegment2D::sense(), and g2o::SensorPointXYBearing::sense().
|
inline |
Definition at line 133 of file simulator.h.
|
inline |
Definition at line 129 of file simulator.h.
Referenced by g2o::SensorOdometry< R, E, O >::sense(), g2o::SensorPose3DOffset::sense(), g2o::SensorOdometry2D::sense(), g2o::SensorPose3D::sense(), g2o::SensorOdometry3D::sense(), g2o::SensorPointXY::sense(), g2o::SensorPointXYZDepth::sense(), g2o::SensorPose2D::sense(), g2o::SensorSE3Prior::sense(), g2o::SensorPointXYZ::sense(), g2o::SensorPointXYZDisparity::sense(), g2o::SensorSegment2DPointLine::sense(), g2o::SensorSegment2DLine::sense(), g2o::SensorPointXYOffset::sense(), g2o::SensorSegment2D::sense(), and g2o::SensorPointXYBearing::sense().
|
pure virtual |
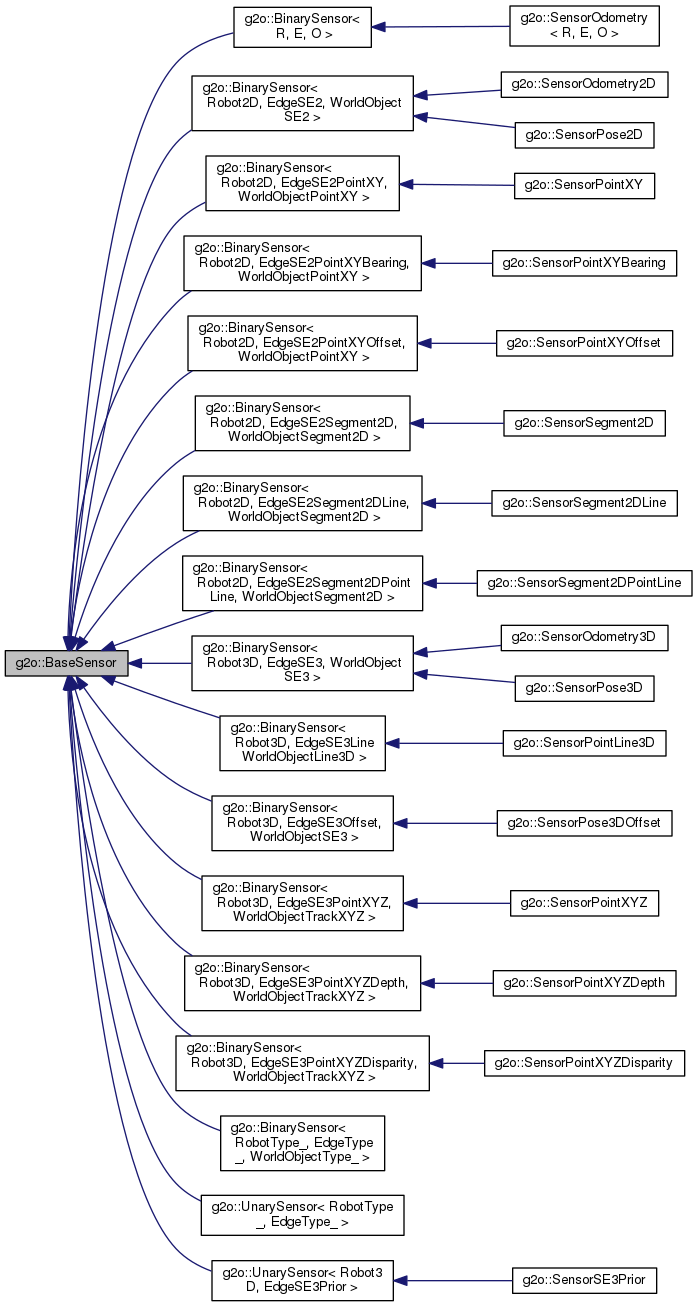
Implemented in g2o::BinarySensor< RobotType_, EdgeType_, WorldObjectType_ >, g2o::BinarySensor< Robot3D, EdgeSE3PointXYZDisparity, WorldObjectTrackXYZ >, g2o::BinarySensor< Robot3D, EdgeSE3Offset, WorldObjectSE3 >, g2o::BinarySensor< Robot2D, EdgeSE2PointXYBearing, WorldObjectPointXY >, g2o::BinarySensor< R, E, O >, g2o::BinarySensor< Robot2D, EdgeSE2Segment2DPointLine, WorldObjectSegment2D >, g2o::BinarySensor< Robot2D, EdgeSE2Segment2DLine, WorldObjectSegment2D >, g2o::BinarySensor< Robot3D, EdgeSE3PointXYZ, WorldObjectTrackXYZ >, g2o::BinarySensor< Robot2D, EdgeSE2, WorldObjectSE2 >, g2o::BinarySensor< Robot3D, EdgeSE3, WorldObjectSE3 >, g2o::BinarySensor< Robot2D, EdgeSE2Segment2D, WorldObjectSegment2D >, g2o::BinarySensor< Robot3D, EdgeSE3Line WorldObjectLine3D >, g2o::BinarySensor< Robot3D, EdgeSE3PointXYZDepth, WorldObjectTrackXYZ >, g2o::BinarySensor< Robot2D, EdgeSE2PointXYOffset, WorldObjectPointXY >, g2o::BinarySensor< Robot2D, EdgeSE2PointXY, WorldObjectPointXY >, g2o::UnarySensor< RobotType_, EdgeType_ >, g2o::UnarySensor< Robot3D, EdgeSE3Prior >, g2o::SensorPointXYBearing, g2o::SensorPointXYOffset, g2o::SensorPointXYZDisparity, g2o::SensorSegment2D, g2o::SensorSegment2DLine, g2o::SensorSegment2DPointLine, g2o::SensorPointLine3D, g2o::SensorPointXY, g2o::SensorPointXYZ, g2o::SensorPointXYZDepth, g2o::SensorPose2D, g2o::SensorSE3Prior, g2o::SensorOdometry2D, g2o::SensorOdometry3D, g2o::SensorPose3D, g2o::SensorOdometry< R, E, O >, and g2o::SensorPose3DOffset.
Referenced by g2o::BaseRobot::sense().
|
inline |
Definition at line 130 of file simulator.h.
References graph.
Referenced by g2o::BaseRobot::addSensor().
| World * g2o::BaseSensor::world | ( | ) |
Definition at line 69 of file simulator.cpp.
Referenced by g2o::SensorPointXYZ::addParameters(), g2o::SensorPointXYZDepth::addParameters(), g2o::SensorSE3Prior::addParameters(), g2o::SensorPointXYZDisparity::addParameters(), g2o::SensorPose3DOffset::addParameters(), g2o::SensorPointXYOffset::addParameters(), g2o::SensorPose3DOffset::sense(), g2o::SensorPose3D::sense(), g2o::SensorPointXYZDepth::sense(), g2o::SensorPose2D::sense(), g2o::SensorPointXYZ::sense(), g2o::SensorPointXY::sense(), g2o::SensorSegment2D::sense(), g2o::SensorSegment2DLine::sense(), g2o::SensorPointXYBearing::sense(), g2o::SensorSegment2DPointLine::sense(), g2o::SensorPointXYOffset::sense(), and g2o::SensorPointXYZDisparity::sense().
|
protected |
Definition at line 137 of file simulator.h.
|
protected |
Definition at line 138 of file simulator.h.
|
protected |
Definition at line 139 of file simulator.h.
 1.8.11
1.8.11

