|
g2o
|
#include <simulator.h>
Public Member Functions | |
| World (OptimizableGraph *graph_) | |
| OptimizableGraph * | graph () |
| bool | addRobot (BaseRobot *robot) |
| bool | addWorldObject (BaseWorldObject *worldObject) |
| bool | addParameter (Parameter *p) |
| std::set< BaseWorldObject * > & | objects () |
| std::set< BaseRobot * > & | robots () |
Protected Attributes | |
| std::set< BaseWorldObject * > | _objects |
| std::set< BaseRobot * > | _robots |
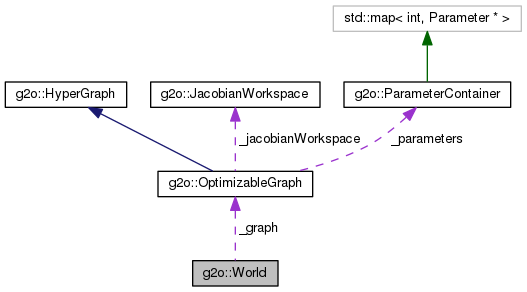
| OptimizableGraph * | _graph |
| int | _runningId |
| int | _paramId |
Definition at line 275 of file simulator.h.
|
inline |
Definition at line 278 of file simulator.h.
| bool g2o::World::addParameter | ( | Parameter * | p | ) |
Definition at line 102 of file simulator.cpp.
References graph, and g2o::Parameter::setId().
Referenced by g2o::SensorPointXYZ::addParameters(), g2o::SensorSE3Prior::addParameters(), g2o::SensorPointXYZDepth::addParameters(), g2o::SensorPointXYZDisparity::addParameters(), g2o::SensorPose3DOffset::addParameters(), and g2o::SensorPointXYOffset::addParameters().
| bool g2o::World::addRobot | ( | BaseRobot * | robot | ) |
Definition at line 82 of file simulator.cpp.
References g2o::BaseRobot::setWorld().
Referenced by main().
| bool g2o::World::addWorldObject | ( | BaseWorldObject * | worldObject | ) |
Definition at line 90 of file simulator.cpp.
References graph, and g2o::BaseWorldObject::vertex().
Referenced by main().
|
inline |
Definition at line 279 of file simulator.h.
|
inline |
Definition at line 284 of file simulator.h.
Referenced by g2o::SensorPose3DOffset::sense(), g2o::SensorPose3D::sense(), g2o::SensorPointXY::sense(), g2o::SensorPointXYZ::sense(), g2o::SensorPointXYZDepth::sense(), g2o::SensorPose2D::sense(), g2o::SensorPointXYOffset::sense(), g2o::SensorPointXYZDisparity::sense(), g2o::SensorSegment2D::sense(), g2o::SensorSegment2DLine::sense(), g2o::SensorPointXYBearing::sense(), and g2o::SensorSegment2DPointLine::sense().
|
inline |
Definition at line 285 of file simulator.h.
|
protected |
Definition at line 289 of file simulator.h.
|
protected |
Definition at line 287 of file simulator.h.
|
protected |
Definition at line 291 of file simulator.h.
|
protected |
Definition at line 288 of file simulator.h.
|
protected |
Definition at line 290 of file simulator.h.
 1.8.11
1.8.11

