|
g2o
|
string tag to be attached to a vertex More...
#include <vertex_tag.h>
Public Member Functions | |
| VertexTag () | |
| ~VertexTag () | |
| virtual bool | write (std::ostream &os) const |
| write the data to a stream More... | |
| virtual bool | read (std::istream &is) |
| read the data from a stream More... | |
| const std::string | name () const |
| void | setName (const std::string &name_) |
| const Vector3F & | position () const |
| void | setPosition (const Vector3F &p) |
 Public Member Functions inherited from g2o::RobotData Public Member Functions inherited from g2o::RobotData | |
| RobotData () | |
| virtual | ~RobotData () |
| double | timestamp () const |
| void | setTimestamp (double ts) |
| double | loggerTimestamp () const |
| void | setLoggerTimestamp (double ts) |
| const std::string & | tag () const |
| void | setTag (const std::string &tag) |
| const std::string & | hostname () const |
| void | setHostname (const std::string &hostname) |
| Public Member Functions inherited from g2o::HyperGraph::Data | |
| Data () | |
| ~Data () | |
| virtual HyperGraph::HyperGraphElementType | elementType () const |
| const Data * | next () const |
| Data * | next () |
| void | setNext (Data *next_) |
| DataContainer * | dataContainer () |
| const DataContainer * | dataContainer () const |
| void | setDataContainer (DataContainer *dataContainer_) |
| Public Member Functions inherited from g2o::HyperGraph::HyperGraphElement | |
| virtual | ~HyperGraphElement () |
| HyperGraphElement * | clone () const |
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | |
Protected Attributes | |
| std::string | _name |
| Vector3F | _position |
| Vector3F | _odom2d |
| Protected Attributes inherited from g2o::RobotData | |
| double | _timestamp |
| timestamp when the measurement was generated More... | |
| double | _loggerTimestamp |
| timestamp when the measurement was recorded More... | |
| std::string | _tag |
| string tag (FLASER, ROBOTLASER, ODOM..) of the line in the log More... | |
| std::string | _hostname |
| name of the computer/robot generating the data More... | |
| Protected Attributes inherited from g2o::HyperGraph::Data | |
| Data * | _next |
| DataContainer * | _dataContainer |
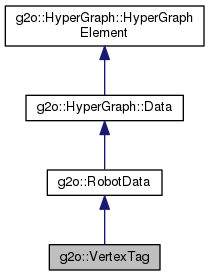
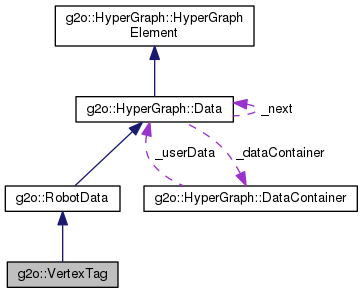
string tag to be attached to a vertex
A laser measurement obtained by a robot. The measurement is equipped with a pose of the robot at which the measurement was taken. The read/write function correspond to the CARMEN logfile format.
Definition at line 42 of file vertex_tag.h.
| g2o::VertexTag::VertexTag | ( | ) |
Definition at line 42 of file vertex_tag.cpp.
| g2o::VertexTag::~VertexTag | ( | ) |
Definition at line 46 of file vertex_tag.cpp.
|
inline |
|
inline |
|
virtual |
read the data from a stream
Implements g2o::HyperGraph::Data.
Definition at line 50 of file vertex_tag.cpp.
References g2o::RobotData::_hostname, g2o::RobotData::_loggerTimestamp, _name, _odom2d, _position, and g2o::RobotData::_timestamp.
|
inline |
Definition at line 53 of file vertex_tag.h.
|
inline |
Definition at line 55 of file vertex_tag.h.
|
virtual |
write the data to a stream
Implements g2o::HyperGraph::Data.
Definition at line 61 of file vertex_tag.cpp.
References _name, _odom2d, _position, g2o::opengl::drawBox(), g2o::RobotData::hostname(), g2o::RobotData::loggerTimestamp(), name(), position(), g2o::DrawAction::refreshPropertyPtrs(), and g2o::RobotData::timestamp().
|
protected |
Definition at line 57 of file vertex_tag.h.
|
protected |
Definition at line 59 of file vertex_tag.h.
|
protected |
Definition at line 58 of file vertex_tag.h.
| g2o::VertexTag::EIGEN_MAKE_ALIGNED_OPERATOR_NEW |
Definition at line 45 of file vertex_tag.h.
 1.8.11
1.8.11

