|
g2o
|
#include <cstdlib>#include "g2o/core/optimizable_graph.h"#include "g2o/stuff/command_args.h"#include "g2o/types/slam2d/types_slam2d.h"#include "g2o/types/slam3d/types_slam3d.h"#include <iostream>#include <fstream>#include <sstream>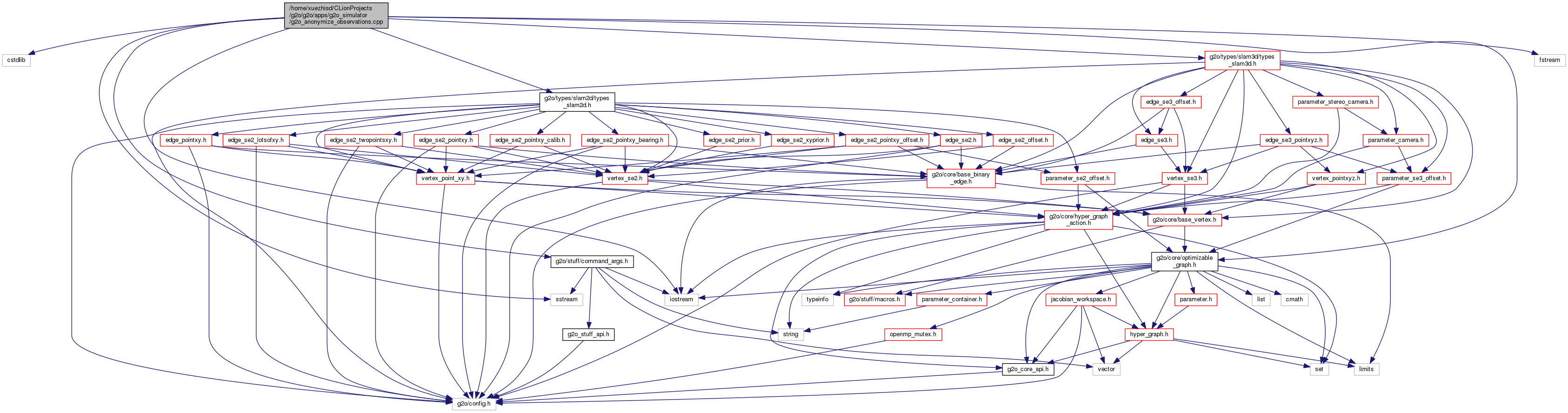
Go to the source code of this file.
Functions | |
| template<typename T > | |
| bool | anonymizeLandmarkEdge (HyperGraph::Edge *e_, OptimizableGraph &g) |
| template<typename T > | |
| bool | anonymizePoseEdge (HyperGraph::Edge *e_, OptimizableGraph &g) |
| int | main (int argc, char **argv) |
| bool anonymizeLandmarkEdge | ( | HyperGraph::Edge * | e_, |
| OptimizableGraph & | g | ||
| ) |
Definition at line 40 of file g2o_anonymize_observations.cpp.
References g2o::OptimizableGraph::setEdgeVertex().
| bool anonymizePoseEdge | ( | HyperGraph::Edge * | e_, |
| OptimizableGraph & | g | ||
| ) |
Definition at line 49 of file g2o_anonymize_observations.cpp.
References g2o::HyperGraph::Vertex::id(), and g2o::OptimizableGraph::setEdgeVertex().
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 70 of file g2o_anonymize_observations.cpp.
References g2o::HyperGraph::edges(), graph, g2o::OptimizableGraph::load(), g2o::CommandArgs::param(), g2o::CommandArgs::paramLeftOver(), g2o::CommandArgs::parseArgs(), and g2o::OptimizableGraph::save().
 1.8.11
1.8.11

