|
g2o
|
odometry constraint More...
#include <simulator.h>
Public Attributes | |
| int | from |
| int | to |
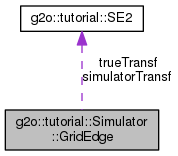
| SE2 | trueTransf |
| SE2 | simulatorTransf |
| Eigen::Matrix3d | information |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | |
odometry constraint
Definition at line 80 of file simulator.h.
| g2o::tutorial::Simulator::GridEdge::EIGEN_MAKE_ALIGNED_OPERATOR_NEW |
Definition at line 87 of file simulator.h.
| int g2o::tutorial::Simulator::GridEdge::from |
Definition at line 82 of file simulator.h.
Referenced by g2o::tutorial::Simulator::simulate().
| Eigen::Matrix3d g2o::tutorial::Simulator::GridEdge::information |
Definition at line 86 of file simulator.h.
Referenced by g2o::tutorial::Simulator::simulate().
| SE2 g2o::tutorial::Simulator::GridEdge::simulatorTransf |
Definition at line 85 of file simulator.h.
Referenced by g2o::tutorial::Simulator::simulate().
| int g2o::tutorial::Simulator::GridEdge::to |
Definition at line 83 of file simulator.h.
Referenced by g2o::tutorial::Simulator::simulate().
| SE2 g2o::tutorial::Simulator::GridEdge::trueTransf |
Definition at line 84 of file simulator.h.
Referenced by g2o::tutorial::Simulator::simulate().
 1.8.11
1.8.11

