|
g2o
|
#include <slam2d_viewer.h>
Public Member Functions | |
| Slam2DViewer (QWidget *parent=NULL, const QGLWidget *shareWidget=0, Qt::WFlags flags=0) | |
| ~Slam2DViewer () | |
| virtual void | draw () |
| void | init () |
Public Attributes | |
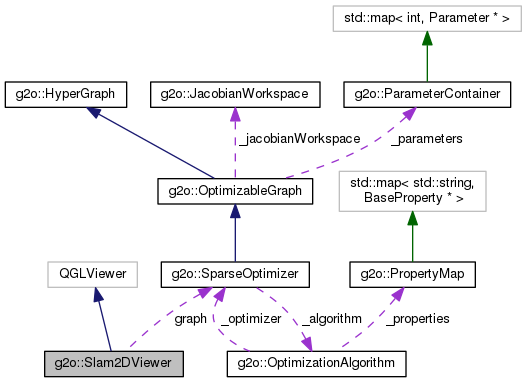
| SparseOptimizer * | graph |
| bool | drawCovariance |
Definition at line 28 of file slam2d_viewer.h.
| g2o::Slam2DViewer::Slam2DViewer | ( | QWidget * | parent = NULL, |
| const QGLWidget * | shareWidget = 0, |
||
| Qt::WFlags | flags = 0 |
||
| ) |
Definition at line 131 of file slam2d_viewer.cpp.
| g2o::Slam2DViewer::~Slam2DViewer | ( | ) |
Definition at line 137 of file slam2d_viewer.cpp.
|
virtual |
Definition at line 141 of file slam2d_viewer.cpp.
References drawCovariance, g2o::BaseVertex< D, T >::estimate(), graph, and g2o::HyperGraph::vertices().
| void g2o::Slam2DViewer::init | ( | ) |
| bool g2o::Slam2DViewer::drawCovariance |
Definition at line 38 of file slam2d_viewer.h.
Referenced by draw().
| SparseOptimizer* g2o::Slam2DViewer::graph |
Definition at line 37 of file slam2d_viewer.h.
Referenced by draw().
 1.8.11
1.8.11

