|
g2o
|
cost for traversing along active edges in the optimizer More...
#include <estimate_propagator.h>
Public Member Functions | |
| EstimatePropagatorCost (SparseOptimizer *graph) | |
| virtual double | operator() (OptimizableGraph::Edge *edge, const OptimizableGraph::VertexSet &from, OptimizableGraph::Vertex *to_) const |
| virtual const char * | name () const |
Protected Attributes | |
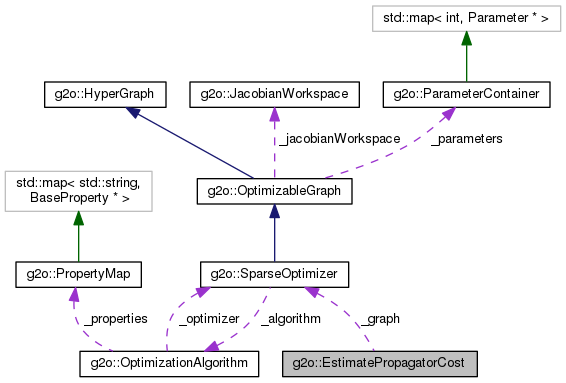
| SparseOptimizer * | _graph |
cost for traversing along active edges in the optimizer
You may derive an own one, if necessary. The default is to return initialEstimatePossible(from, to) for the edge.
Definition at line 47 of file estimate_propagator.h.
| g2o::EstimatePropagatorCost::EstimatePropagatorCost | ( | SparseOptimizer * | graph | ) |
Definition at line 237 of file estimate_propagator.cpp.
|
inlinevirtual |
Reimplemented in g2o::EstimatePropagatorCostOdometry.
Definition at line 51 of file estimate_propagator.h.
Referenced by g2o::SparseOptimizer::computeInitialGuess().
|
virtual |
Reimplemented in g2o::EstimatePropagatorCostOdometry.
Definition at line 242 of file estimate_propagator.cpp.
References _graph, g2o::SparseOptimizer::activeEdges(), g2o::SparseOptimizer::findActiveEdge(), and g2o::OptimizableGraph::Edge::initialEstimatePossible().
|
protected |
Definition at line 53 of file estimate_propagator.h.
Referenced by operator()(), and g2o::EstimatePropagatorCostOdometry::operator()().
 1.8.11
1.8.11

