|
g2o
|
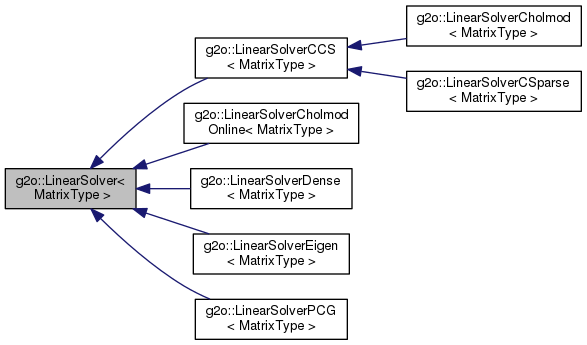
basic solver for Ax = b More...
#include <linear_solver.h>
Public Member Functions | |
| LinearSolver () | |
| virtual | ~LinearSolver () |
| virtual bool | init ()=0 |
| virtual bool | solve (const SparseBlockMatrix< MatrixType > &A, double *x, double *b)=0 |
| virtual bool | solveBlocks (double **&blocks, const SparseBlockMatrix< MatrixType > &A) |
| virtual bool | solvePattern (SparseBlockMatrix< MatrixXD > &spinv, const std::vector< std::pair< int, int > > &blockIndices, const SparseBlockMatrix< MatrixType > &A) |
| virtual bool | writeDebug () const |
| write a debug dump of the system matrix if it is not PSD in solve More... | |
| virtual void | setWriteDebug (bool) |
basic solver for Ax = b
basic solver for Ax = b which has to reimplemented for different linear algebra libraries. A is assumed to be symmetric (only upper triangular block is stored) and positive-semi-definit.
Definition at line 41 of file linear_solver.h.
|
inline |
Definition at line 44 of file linear_solver.h.
|
inlinevirtual |
Definition at line 45 of file linear_solver.h.
|
pure virtual |
init for operating on matrices with a different non-zero pattern like before
Implemented in g2o::LinearSolverCholmod< MatrixType >, g2o::LinearSolverCSparse< MatrixType >, g2o::LinearSolverEigen< MatrixType >, g2o::LinearSolverCholmodOnline< MatrixType >, g2o::LinearSolverPCG< MatrixType >, and g2o::LinearSolverDense< MatrixType >.
Referenced by g2o::BlockSolver< Traits >::init(), and g2o::LinearSolver< PoseMatrixType >::~LinearSolver().
|
inlinevirtual |
Reimplemented in g2o::LinearSolverCholmod< MatrixType >, g2o::LinearSolverCSparse< MatrixType >, and g2o::LinearSolverEigen< MatrixType >.
Definition at line 80 of file linear_solver.h.
Referenced by g2o::BlockSolver< Traits >::setWriteDebug().
|
pure virtual |
Assumes that A is the same matrix for several calls. Among other assumptions, the non-zero pattern does not change! If the matrix changes call init() before. solve system Ax = b, x and b have to allocated beforehand!!
Implemented in g2o::LinearSolverCholmod< MatrixType >, g2o::LinearSolverCSparse< MatrixType >, g2o::LinearSolverEigen< MatrixType >, g2o::LinearSolverCholmodOnline< MatrixType >, g2o::LinearSolverPCG< MatrixType >, and g2o::LinearSolverDense< MatrixType >.
Referenced by g2o::BlockSolver< Traits >::solve(), and g2o::LinearSolver< PoseMatrixType >::~LinearSolver().
|
inlinevirtual |
Inverts the diagonal blocks of A
Reimplemented in g2o::LinearSolverCholmod< MatrixType >, and g2o::LinearSolverCSparse< MatrixType >.
Definition at line 64 of file linear_solver.h.
|
inlinevirtual |
Inverts the a block pattern of A in spinv
Reimplemented in g2o::LinearSolverCholmod< MatrixType >, and g2o::LinearSolverCSparse< MatrixType >.
Definition at line 71 of file linear_solver.h.
Referenced by g2o::BlockSolver< Traits >::computeMarginals().
|
inlinevirtual |
write a debug dump of the system matrix if it is not PSD in solve
Reimplemented in g2o::LinearSolverCholmod< MatrixType >, g2o::LinearSolverCSparse< MatrixType >, and g2o::LinearSolverEigen< MatrixType >.
Definition at line 79 of file linear_solver.h.
 1.8.11
1.8.11

