|
g2o
|
#include "g2o/config.h"#include "g2o/core/base_vertex.h"#include "g2o/core/base_binary_edge.h"#include "g2o/core/hyper_graph_action.h"#include "vertex_se3.h"#include "edge_se3.h"#include "vertex_pointxyz.h"#include "parameter_se3_offset.h"#include "edge_se3_pointxyz.h"#include "edge_se3_offset.h"#include "parameter_camera.h"#include "parameter_stereo_camera.h"#include "edge_se3_pointxyz_disparity.h"#include "edge_se3_pointxyz_depth.h"#include "edge_se3_prior.h"#include "edge_pointxyz.h"#include "edge_se3_lotsofxyz.h"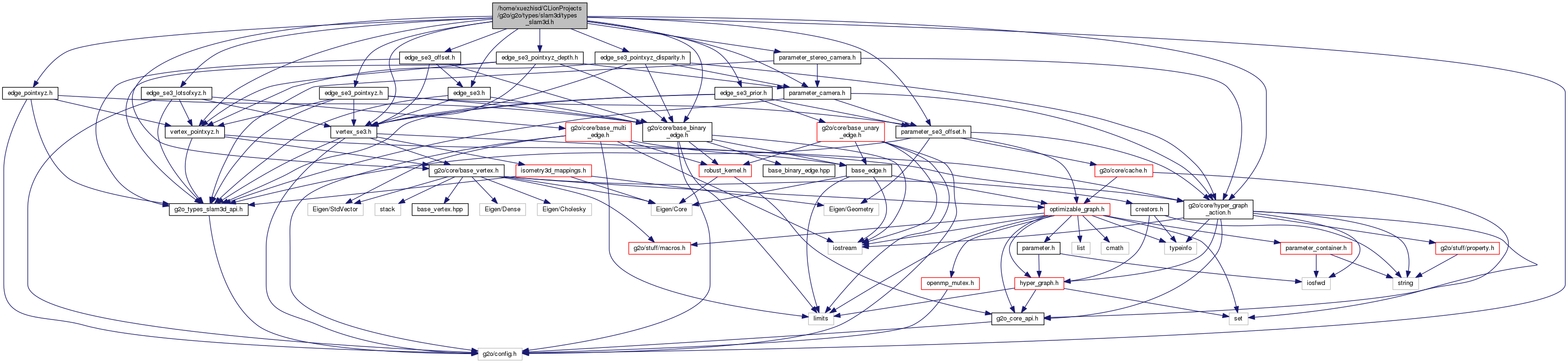

Go to the source code of this file.
Macros | |
| #define | THREE_D_TYPES_ANALYTIC_JACOBIAN |
| #define THREE_D_TYPES_ANALYTIC_JACOBIAN |
Definition at line 25 of file types_slam3d.h.
 1.8.11
1.8.11

