|
g2o
|
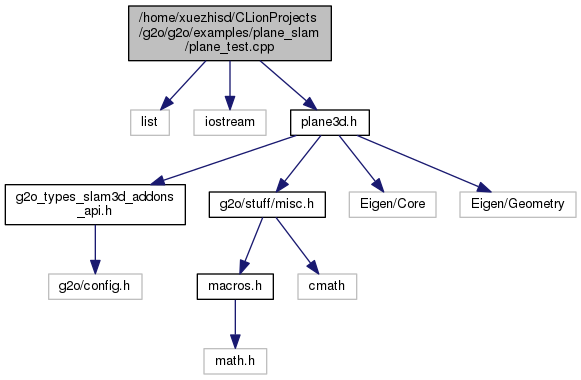
Go to the source code of this file.
Typedefs | |
| typedef std::list< Plane3D * > | PlaneList |
Functions | |
| ostream & | operator<< (ostream &os, const Plane3D &p) |
| void | transform (PlaneList &l, const SE3Quat &t) |
| ostream & | operator<< (ostream &os, const PlaneList &l) |
| int | main () |
Definition at line 15 of file plane_test.cpp.
| int main | ( | ) |
Definition at line 33 of file plane_test.cpp.
References g2o::Plane3D::azimuth(), g2o::Plane3D::elevation(), g2o::Plane3D::fromVector(), g2o::Plane3D::normal(), g2o::Plane3D::ominus(), g2o::Plane3D::oplus(), and transform().
| ostream& operator<< | ( | ostream & | os, |
| const Plane3D & | p | ||
| ) |
| ostream& operator<< | ( | ostream & | os, |
| const PlaneList & | l | ||
| ) |
Definition at line 24 of file plane_test.cpp.
Definition at line 17 of file plane_test.cpp.
Referenced by g2o::Edge_V_V_GICP::computeError(), main(), g2o::strToLower(), and g2o::strToUpper().
 1.8.11
1.8.11

