|
g2o
|
#include "g2o/types/sclam2d/odometry_measurement.h"#include "g2o/types/sclam2d/vertex_odom_differential_params.h"#include "g2o/types/slam2d/vertex_se2.h"#include "g2o/core/base_binary_edge.h"#include "g2o_calibration_odom_laser_api.h"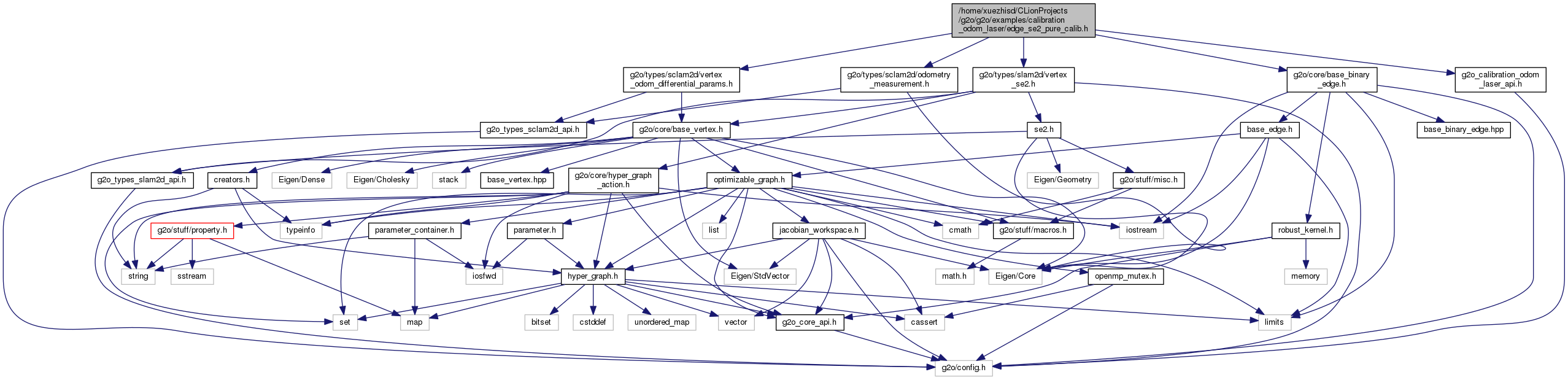
Go to the source code of this file.
Classes | |
| struct | g2o::OdomAndLaserMotion |
| class | g2o::EdgeSE2PureCalib |
| calibrate odometry and laser based on a set of measurements More... | |
Namespaces | |
| g2o | |
 1.8.11
1.8.11

