|
g2o
|
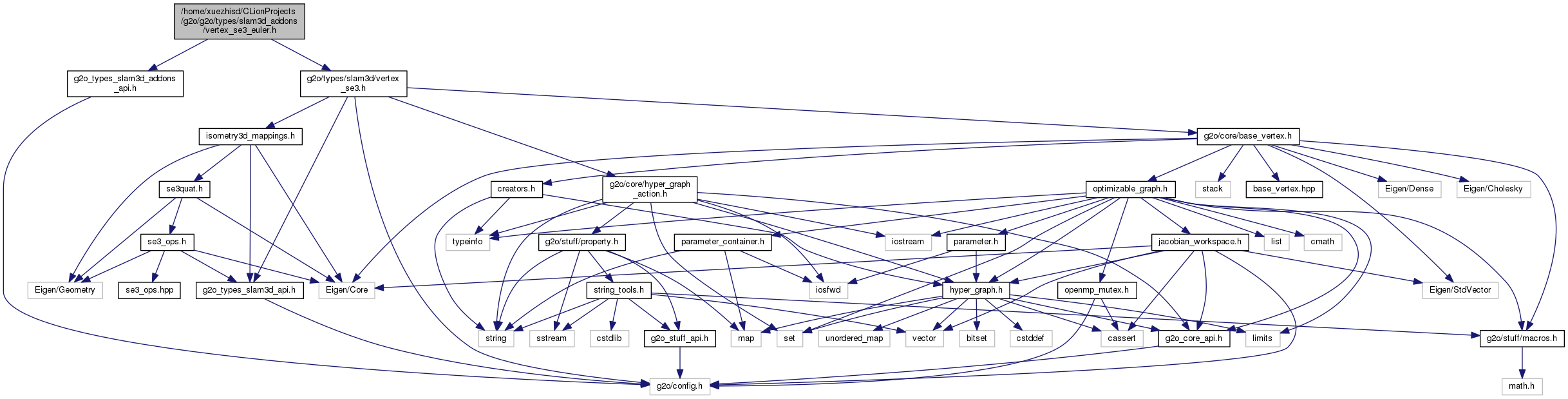
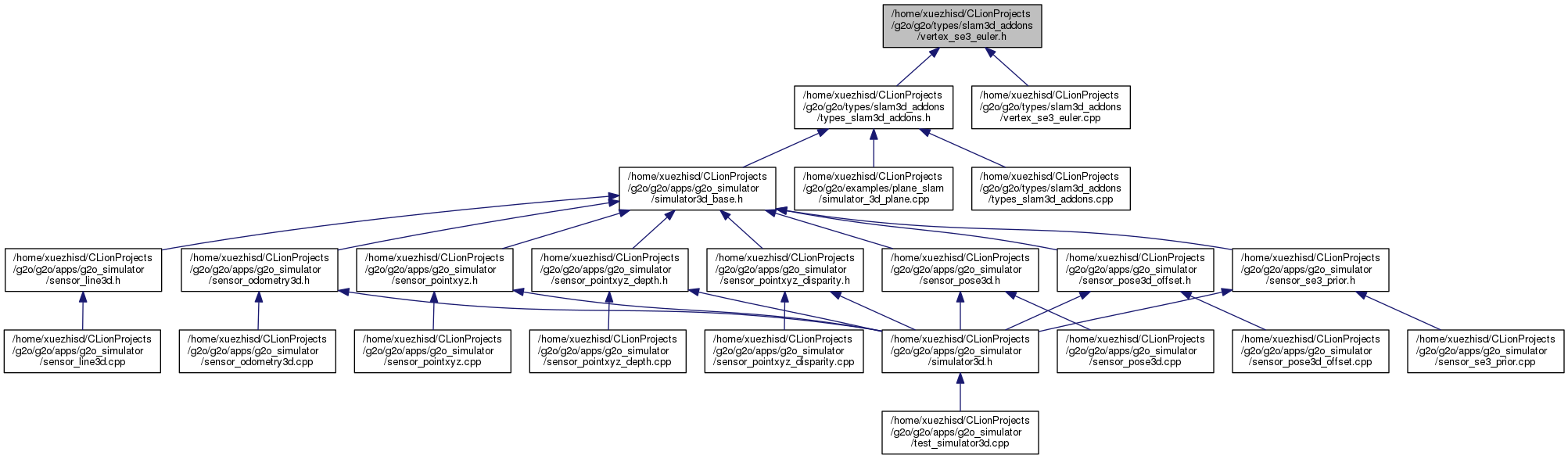
Go to the source code of this file.
Classes | |
| class | g2o::VertexSE3Euler |
| 3D pose Vertex, (x,y,z,roll,pitch,yaw) the internal parameterization is the same as veretx_se3_quat. Only the read/write operations are rewritten to input/output euler angles. More... | |
Namespaces | |
| g2o | |
 1.8.11
1.8.11

