|
g2o
|
#include "tools.h"#include <queue>#include <iostream>#include <vector>#include <map>#include <set>#include <limits>#include <cassert>#include "g2o/types/slam2d/types_three_dof.h"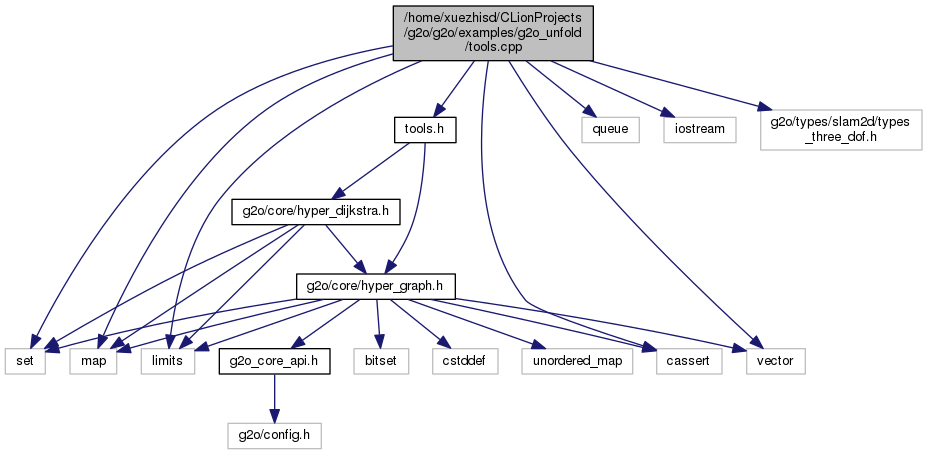
Go to the source code of this file.
Namespaces | |
| g2o | |
Functions | |
| void | g2o::findConnectedEdgesWithCostLimit (HyperGraph::EdgeSet &selected, HyperGraph::EdgeSet &border, HyperGraph::Edge *start, HyperDijkstra::CostFunction *cost, double maxEdgeCost, double comparisonConditioner) |
 1.8.11
1.8.11

