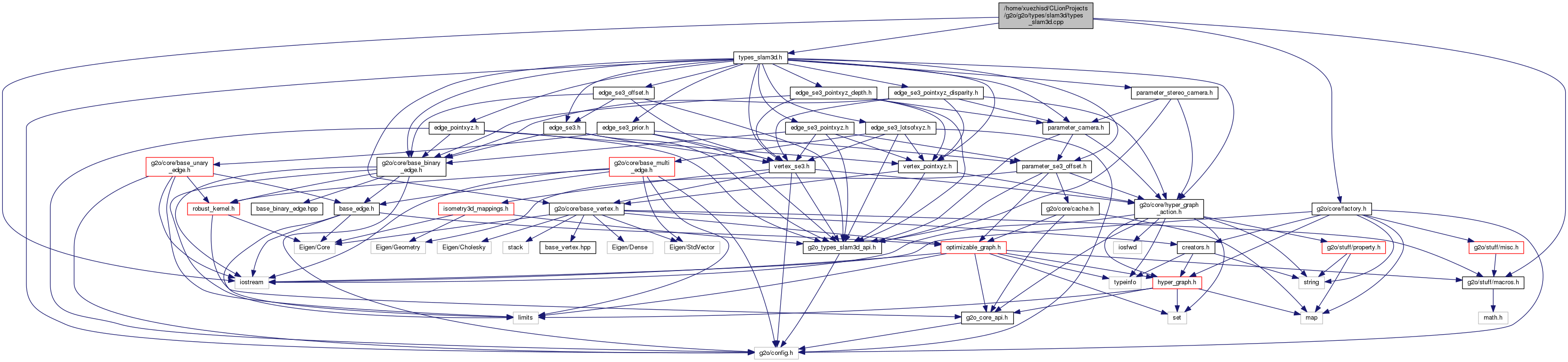
#include "types_slam3d.h"
#include "g2o/core/factory.h"
#include "g2o/stuff/macros.h"
#include <iostream>
Go to the source code of this file.
|
| | g2o::G2O_REGISTER_TYPE_GROUP (slam3d) |
| |
| | g2o::G2O_REGISTER_TYPE (VERTEX_SE3:QUAT, VertexSE3) |
| |
| | g2o::G2O_REGISTER_TYPE (EDGE_SE3:QUAT, EdgeSE3) |
| |
| | g2o::G2O_REGISTER_TYPE (VERTEX_TRACKXYZ, VertexPointXYZ) |
| |
| | g2o::G2O_REGISTER_TYPE (PARAMS_SE3OFFSET, ParameterSE3Offset) |
| |
| | g2o::G2O_REGISTER_TYPE (EDGE_SE3_TRACKXYZ, EdgeSE3PointXYZ) |
| |
| | g2o::G2O_REGISTER_TYPE (EDGE_SE3_PRIOR, EdgeSE3Prior) |
| |
| | g2o::G2O_REGISTER_TYPE (CACHE_SE3_OFFSET, CacheSE3Offset) |
| |
| | g2o::G2O_REGISTER_TYPE (EDGE_SE3_OFFSET, EdgeSE3Offset) |
| |
| | g2o::G2O_REGISTER_TYPE (PARAMS_CAMERACALIB, ParameterCamera) |
| |
| | g2o::G2O_REGISTER_TYPE (PARAMS_STEREOCAMERACALIB, ParameterStereoCamera) |
| |
| | g2o::G2O_REGISTER_TYPE (CACHE_CAMERA, CacheCamera) |
| |
| | g2o::G2O_REGISTER_TYPE (EDGE_PROJECT_DISPARITY, EdgeSE3PointXYZDisparity) |
| |
| | g2o::G2O_REGISTER_TYPE (EDGE_PROJECT_DEPTH, EdgeSE3PointXYZDepth) |
| |
| | g2o::G2O_REGISTER_TYPE (EDGE_POINTXYZ, EdgePointXYZ) |
| |
| | g2o::G2O_REGISTER_ACTION (VertexSE3WriteGnuplotAction) |
| |
| | g2o::G2O_REGISTER_ACTION (VertexPointXYZWriteGnuplotAction) |
| |
| | g2o::G2O_REGISTER_ACTION (EdgeSE3WriteGnuplotAction) |
| |
 1.8.11
1.8.11

