|
g2o
|
#include "g2o/types/slam3d/se3quat.h"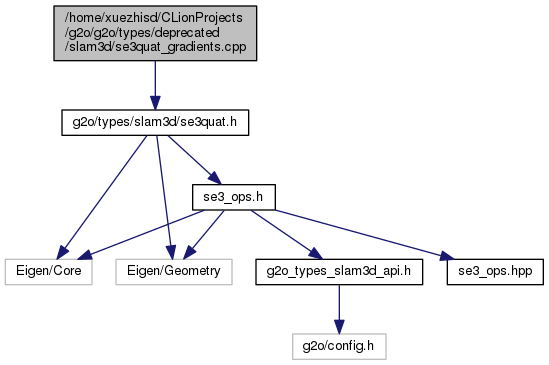
Go to the source code of this file.
Namespaces | |
| g2o | |
| g2o::deprecated | |
Functions | |
| Eigen::Quaterniond | g2o::deprecated::euler_to_quat (double yaw, double pitch, double roll) |
| void | g2o::deprecated::quat_to_euler (const Eigen::Quaterniond &q, double &yaw, double &pitch, double &roll) |
| void | g2o::deprecated::jac_quat3_euler3 (Eigen::Matrix< double, 6, 6 > &J, const SE3Quat &t) |
 1.8.11
1.8.11

